Момент силы
Размерность Единицы измерения СИ СГС Примечания| Момент силы | |
| M → = [ r → × F → ] {\displaystyle {\vec {M}}=\left[{\vec {r}}\times {\vec {F}}\right]} | |
|
L2MT−2 |
|
|
Н·м |
|
|
Дина-сантиметр |
|
|
Псевдовектор |
|
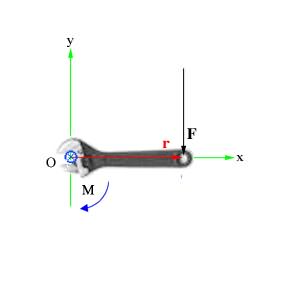 Момент силы, приложенный к гаечному ключу. Направлен от зрителя
Момент силы, приложенный к гаечному ключу. Направлен от зрителя  Зависимости между силой F, моментом силы τ (M), импульсом p и моментом импульса L в системе, которая была ограничена только в одной плоскости (силы и моменты, обусловленные тяжестью и трением, не учитываются).
Зависимости между силой F, моментом силы τ (M), импульсом p и моментом импульса L в системе, которая была ограничена только в одной плоскости (силы и моменты, обусловленные тяжестью и трением, не учитываются).
Момент силы (синонимы: крутящий момент, вращательный момент, вертящий момент, вращающий момент) — векторная физическая величина, равная векторному произведению радиус-вектора, проведённого от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Понятия «вращающий» и «крутящий» моменты в общем случае не тождественны, так как в технике понятие «вращающий» момент рассматривается как внешнее усилие, прикладываемое к объекту, а «крутящий» — внутреннее усилие, возникающее в объекте под действием приложенных нагрузок (этим понятием оперируют в сопротивлении материалов).
Общие сведения
В физике момент силы можно понимать как «вращающая сила». В Международной системе единиц (СИ) единицей измерения момента силы является ньютон-метр. Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. В простейшем случае, если сила приложена к рычагу перпендикулярно ему, момент силы определяется как произведение величины этой силы на расстояние до оси вращения рычага. Например, сила в 3 ньютона, приложенная к рычагу на расстоянии 2 метра от его оси вращения, создаёт такой же момент, что и сила в 1 ньютон, приложенная к рычагу на расстоянии 6 метров от оси вращения. Более точно момент силы частицы определяется как векторное произведение:
M → = [ r → × F → ] {\displaystyle {\vec {M}}=\left[{\vec {r}}\times {\vec {F}}\right]} ,где F → {\displaystyle {\vec {F}}} — сила, действующая на частицу, а r → {\displaystyle {\vec {r}}} — радиус-вектор частицы.
Предыстория
Для того чтобы понять, откуда появилось обозначение момента сил и как к нему пришли, стоит рассмотреть действие силы на рычаг, поворачивающийся относительно неподвижной оси. Работа, совершаемая при действии силы F → {\displaystyle {\vec {F}}} на рычаг r → {\displaystyle {\vec {r}}} , совершающий вращательное движение вокруг неподвижной оси, может быть рассчитана исходя из следующих соображений.
Пусть под действием этой силы конец рычага смещается на бесконечно малый отрезок d l {\displaystyle dl} , которому соответствует бесконечно малый угол d φ {\displaystyle d\varphi } . Обозначим через d → l {\displaystyle {\vec {d}}l} вектор, который направлен вдоль бесконечно малого отрезка d l {\displaystyle dl} и равен ему по модулю. Угол между вектором силы F → {\displaystyle {\vec {F}}} и вектором d → l {\displaystyle {\vec {d}}l} равен β {\displaystyle \beta } , а угол между векторами r → {\displaystyle {\vec {r}}} и F → {\displaystyle {\vec {F}}} — α {\displaystyle \alpha } .
Следовательно, бесконечно малая работа d A {\displaystyle dA} , совершаемая силой F → {\displaystyle {\vec {F}}} на бесконечно малом участке d l {\displaystyle dl} , равна скалярному произведению вектора d → l {\displaystyle {\vec {d}}l} и вектора силы, то есть d A = F → ⋅ d → l {\displaystyle dA={\vec {F}}\cdot {\vec {d}}l} .
Теперь попытаемся выразить модуль вектора d → l {\displaystyle {\vec {d}}l} через радиус-вектор r → {\displaystyle {\vec {r}}} , а проекцию вектора силы F → {\displaystyle {\vec {F}}} на вектор d → l {\displaystyle {\vec {d}}l} — через угол α {\displaystyle \alpha } .
Так как для бесконечно малого перемещения рычага d l {\displaystyle dl} можно считать, что траектория перемещения перпендикулярна рычагу r → {\displaystyle {\vec {r}}} , используя соотношения для прямоугольного треугольника, можно записать следующее равенство: d l = r t g d φ {\displaystyle dl=r\mathrm {tg} \,d\varphi } , где в случае малого угла справедливо t g d φ = d φ {\displaystyle \mathrm {tg} \,d\varphi =d\varphi } и, следовательно, | d l → | = | r → | d φ {\displaystyle \left|{\vec {dl}}\right|=\left|{\vec {r}}\right|d\varphi } .
Для проекции вектора силы F → {\displaystyle {\vec {F}}} на вектор d → l {\displaystyle {\vec {d}}l} видно, что угол β = α − π 2 {\displaystyle \beta =\alpha -{\frac {\pi }{2}}} , а так как cos ( α − π 2 ) = sin α {\displaystyle \cos {\left(\alpha -{\frac {\pi }{2}}\right)}=\sin \alpha } , получаем, что | F → | cos β = | F → | sin α {\displaystyle \left|{\vec {F}}\right|\cos \beta =\left|{\vec {F}}\right|\sin \alpha } .
Теперь запишем бесконечно малую работу через новые равенства: d A = | r → | d φ | F → | sin α {\displaystyle dA=\left|{\vec {r}}\right|d\varphi \left|{\vec {F}}\right|\sin \alpha } , или d A = | r → | | F → | sin ( α ) d φ {\displaystyle dA=\left|{\vec {r}}\right|\left|{\vec {F}}\right|\sin(\alpha )d\varphi } .
Теперь видно, что произведение | r → | | F → | sin α {\displaystyle \left|{\vec {r}}\right|\left|{\vec {F}}\right|\sin \alpha } есть не что иное, как модуль векторного произведения векторов r → {\displaystyle {\vec {r}}} и F → {\displaystyle {\vec {F}}} , то есть | r → × F → | {\displaystyle \left|{\vec {r}}\times {\vec {F}}\right|} , которое и было принято обозначить за момент силы M {\displaystyle M} , или модуль вектора момента силы | M → | {\displaystyle \left|{\vec {M}}\right|} .
Теперь полная работа записывается просто: A = ∫ 0 φ | r → × F → | d φ {\displaystyle A=\int \limits _{0}^{\varphi }\left|{\vec {r}}\times {\vec {F}}\right|d\varphi } , или A = ∫ 0 φ | M → | d φ {\displaystyle A=\int \limits _{0}^{\varphi }\left|{\vec {M}}\right|d\varphi } .
Единицы
Момент силы имеет размерность «сила на расстояние» и единицу измерения ньютон-метр в системе СИ. Энергия и механическая работа также имеют размерность «сила на расстояние» и измеряются в системе СИ в джоулях. Следует заметить, что энергия — это скалярная величина, тогда как момент силы — величина (псевдо) векторная. Совпадение размерностей этих величин не случайность: момент силы 1 Н·м, приложенный через целый оборот, совершает механическую работу и сообщает энергию 2 π {\displaystyle 2\pi } джоулей. Математически:
E = M θ {\displaystyle E=M\theta } ,где Е — энергия, M — вращающий момент, θ — угол в радианах.
Специальные случаи
Формула момента рычага
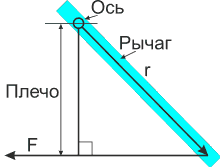 Момент, действующий на рычаг
Момент, действующий на рычаг
Очень интересен особый случай, представляемый как определение момента силы в поле:
| M → | = | M → 1 | | F → | , {\displaystyle \left|{\vec {M}}\right|=\left|{\vec {M}}_{1}\right|\left|{\vec {F}}\right|,} где: | M → 1 | {\displaystyle \left|{\vec {M}}_{1}\right|} — момент рычага, | F → | {\displaystyle \left|{\vec {F}}\right|} — величина действующей силы.Недостаток такого представления в том, что оно не дает направления момента силы, а только его величину. Если сила перпендикулярна вектору r → {\displaystyle {\vec {r}}} , момент рычага будет равен расстоянию до центра до точки приложения силы и момент силы будет максимален:
| T → | = | r → | | F → | {\displaystyle \left|{\vec {T}}\right|=\left|{\vec {r}}\right|\left|{\vec {F}}\right|}Сила под углом
Если сила F → {\displaystyle {\vec {F}}} направлена под углом θ {\displaystyle \theta } к рычагу r, то M = r F sin θ {\displaystyle M=rF\sin \theta } .
Статическое равновесие
Для того чтобы объект находился в равновесии, должна равняться нулю не только сумма всех сил, но и сумма всех моментов силы вокруг любой точки. Для двумерного случая с горизонтальными и вертикальными силами: сумма сил в двух измерениях ΣH=0, ΣV=0 и момент силы в третьем измерении ΣM=0.
Момент силы как функция от времени
Момент силы — производная по времени от момента импульса,
 Воспроизвести медиафайл Видеоурок: вращающий момент
Воспроизвести медиафайл Видеоурок: вращающий момент ru.wikipedia.org
Момент силы
Момент силы — это мера механического воздействия, способного поворачивать тело (мера вращающего действия силы). Он численно определяется произведением модуля силы на ее плечо (расстояние от центра момента1 до линии действия силы):
Момент силы имеет знак плюс, если сила сообщает вращение против часовой стрелки, и минус при обратном его направлении.
Вращающая способность силы проявляется в создании, изменении или прекращении вращательного движения.
Полярный момент силы (момент силы относительно точки) может быть определен для любой силы относительно этой точки (О) (центр момента). Если расстояние от линии действия силы до избранной точки равно нулю, то и момент силы равен нулю. Следовательно, расположенная таким образом сила не обладает вращающей способностью относительно этого центра. Площадь прямоугольника (Fd) численно равна модулю момента силы.
Когда несколько моментов силы приложено к одному телу, их можно привести к одному моменту — главному моменту.
Для определения вектора момента силы1 надо знать: а) м о д у л ь момента (произведение модуля силы на ее плечо); б) плоскость поворота (проходит через линию действия силы и центр момента) и в)направление поворота в этойплоскости.
Осевой момент силы (моментсилы относительно оси) может быть определен для любой силы, кроме совпадающей с осью, ей параллельной или ее пересекающей. Иначе говоря, сила и ось не должны лежать в одной плоскости.
Применяют статическое измерение моментасилы,если его уравновешивает лежащий в той же плоскости равный ему по модулю и противоположный по направлению момент другой силы относительно того же центра момента (например, при равновесии рычага). Моменты сил тяжести звеньев относительно их проксимальных суставов называют статическими моментами звеньев.
Применяют динамическое измерение момента силы, если известны момент инерции тела относительно оси вращения и его угловое ускорение. Как и силы, моменты сил относительно центра могут быть движущими и тормозящими, а стало быть, и уравновешивающими, ускоряющими и замедляющими. Момент силы может быть и отклоняющим— отклоняет в пространстве плоскость поворота.
При всех ускорениях возникают силы инерции: при нормальных ускорениях — центробежные силы инерции, при касательных ускорениях (положительных или отрицательных) — касательные силы инерции. Центробежная сила инерции направлена по радиусу вращения и не имеет момента относительно центра вращения. Касательная же сила инерции приложена для твердого звена в центре его качаний. Таким образом, имеется момент силы инерции относительно оси вращения.
studopedia.ru
МОМЕНТ СИЛЫ это:
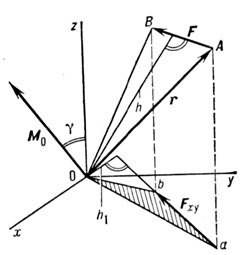
МОМЕНТ СИЛЫ МОМЕНТ СИЛЫвеличина, характеризующая вращат. эффект силы при действии её на тв. тело; одно из осн. понятий механики. Различают М. с. относительно центра (точки) и относительно оси. М. с. относительно центра О — величина векторная. Его модуль MO=Fh, где F — модуль силы, a h — плечо, т. е. длина перпендикуляра, опущенного из О на линию действия силы (рис.); направлен вектор МO перпендикулярно плоскости, проходящей через центр О и силу ? в сторону, откуда поворот, вызываемый силой, виден против хода часовой стрелки (в правой системе координат). С помощью векторного произведения М. с. выражается равенством MO=(r•F), где r — радиус-вектор, проведённый из О в точку приложения силы. Размерность М. с. — L2MT2, единицы — Н•м, дин•см или кгс•м. М. с. относительно оси — величина алгебраическая, равная проекции на эту ось М. с. относительно любой точки О оси или же численной величине момента проекции Fxy силы F на плоскость ху, перпендикулярную оси z, взятого относительно точки пересечения оси с плоскостью. Т. е. Mz= МOcosg=Fxyh1 или Mz= -Fxyh1. Знак минус (последнее выражение) берётся, когда поворот силы F с положит. направления оси z виден по ходу часовой стрелки (тоже в правой системе). М. с. относительно осей х, у, z могут также вычисляться по ф-лам: Mx=yFz-zFy, My=zFx-xFz, Mz=xFy-yFx, где Fx, Fy, Fz — проекции силы F на оси; х, у, z — координаты точки А приложения силы. Если система сил имеет равнодействующую, то её момент вычисляется по Вариньона теореме.
Физический энциклопедический словарь. — М.: Советская энциклопедия. Главный редактор А. М. Прохоров. 1983.
МОМЕНТ СИЛЫ- величина, характеризующая вращательный эффект силы; имеет размерность произведения длины на силу. Различают момент силы относительно центра (точки) и относительно оси.
M. с. относительно центра О наз. векторная величина M0, равная векторному произведению радиуса-вектора r, проведённого из O в точку приложения силы F, на силу M0 = [rF]или в др. обозначениях M0 = r F (рис.). Численно M. с. равен произведению модуля силы на плечо h, т. е. на длину перпендикуляра, опущенного из О на линию действия силы, или удвоенной площади
F (рис.). Численно M. с. равен произведению модуля силы на плечо h, т. е. на длину перпендикуляра, опущенного из О на линию действия силы, или удвоенной площади
треугольника, построенного на центре O и силе:

Направлен вектор M0 перпендикулярно плоскости, проходящей через O и F. Сторона, куда направляется M0, выбирается условно (M0 - аксиальный вектор). При правой системе координат вектор M0 направляют в ту сторону, откуда поворот, совершаемый силой, виден против хода часовой стрелки.
M. с. относительно оси z наз. скалярная величина Mz, равная проекции на ось z вектора M. с. относительно любого центра О, взятого на этой оси; величину Mz можно ещё определять как проекцию на плоскость ху, перпендикулярную оси z, площади треугольника OAB или как момент проекции Fxy силы F на плоскость ху, взятый относительно точки пересечения оси z с этой плоскостью. T. о.,

В двух последних выражениях M. с. считается положительным, когда поворот силы Fxy виден с положит. конца оси z против хода часовой стрелки (в правой системе координат). M. с. относительно координатных осей Oxyz могут также вычисляться по аналитич. ф-лам:

где Fx, Fy, Fz - проекции силы F на координатные оси, х, у, z - координаты точки А приложения силы. Величины Mx, My, Mz равны проекциям вектора M0 на координатные оси.
Если система сил имеет равнодействующую, то момент этой равнодействующей относительно любого центра (или оси) равен сумме моментов всех сил системы относительно того же центра (оси) (см. Вариньона теорема). Понятие о M. с. является одним из осн. понятий механики.
Лит. см. при ст. Статика. С. M. Тарг.
Физическая энциклопедия. В 5-ти томах. — М.: Советская энциклопедия. Главный редактор А. М. Прохоров. 1988.
.
dic.academic.ru
Момент силы относительно точки и оси
Момент силы относительно точки О - это вектор, модуль которого равен произведению модуля силы на плечо - кратчайшее расстояние от точки О до линии действия силы. Направление вектора момента силы перпендикулярно плоскости, проходящей через точку и линию действия силы, так, что глядя по направлению вектора момента, вращение, совершаемое силой вокруг точки О, происходит по часовой стрелке.
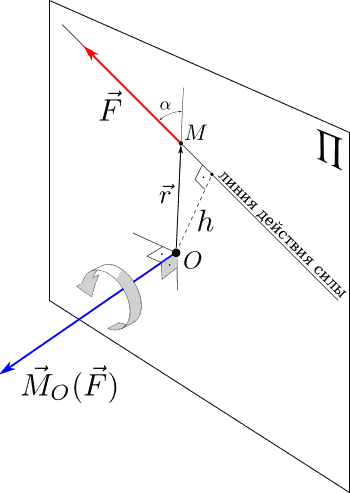
рис.1.2
Если известен радиус-вектор точки приложения силы
точки приложения силы  относительно точки О, то момент этой силы относительно О выражается следующим образом:
относительно точки О, то момент этой силы относительно О выражается следующим образом:
 . (1.8)
. (1.8)
Действительно, модуль этого векторного произведения:
 . (1.9)
. (1.9)
В соответствии с рисунком  , поэтому:
, поэтому:
 |. (1.10)
|. (1.10)
Вектор  , как и результат векторного произведения, перпендикулярен векторами
, как и результат векторного произведения, перпендикулярен векторами , которые принадлежат плоскости Π. Направление векторатаково, что глядя по направлению этого вектора, кратчайшее вращение от
, которые принадлежат плоскости Π. Направление векторатаково, что глядя по направлению этого вектора, кратчайшее вращение от к
к происходит по часовой стрелке. Другими словами, вектордостраивает систему векторов (
происходит по часовой стрелке. Другими словами, вектордостраивает систему векторов ( ) до правой тройки.
) до правой тройки.
Зная координаты точки приложения силы в системе координат, начало которой совпадает с точкой О, и проекцию силы на эти оси координат, момент силы может быть определен следующим образом:
 . (1.11)
. (1.11)
Момент силы относительно оси
Проекция момента силы относительно точки на некоторую ось, проходящую через эту точку, называется моментом силы относительно оси.
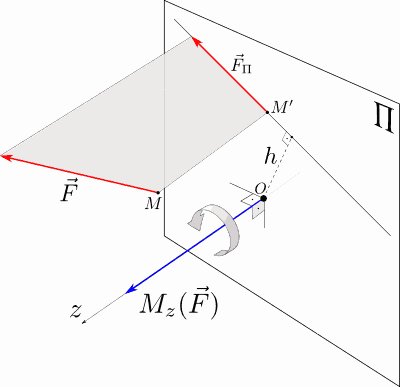 рис.1.3
рис.1.3
Момент силы относительно оси вычисляется как момент проекции силы на плоскость Π, перпендикулярную оси, относительно точки пересечения оси с плоскостью Π:
 (1.12)
(1.12)
Знак момента определяется направлением вращения, которое стремится придать телу сила F⃗ Π. Если, глядя по направлению оси Oz сила вращает тело по часовой стрелке, то момент берется со знаком ``плюс'', иначе - ``минус''.
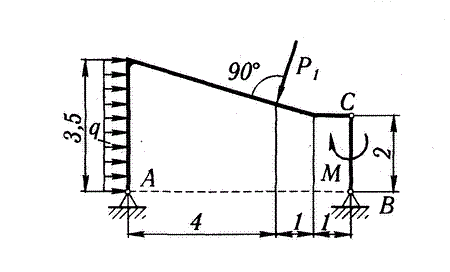
1.2 Постановка задачи.
Определение реакций опор и шарнира С.
|
P1, кН |
M, кН*м |
q, кН/м |
|
5,0 |
24,0 |
0,8 |
1.3 Алгоритм решения задачи.
Разделим конструкцию на части и рассмотрим равновесие каждой из конструкции.
Рассмотрим равновесие всей конструкции в целом. (рис.1.1)
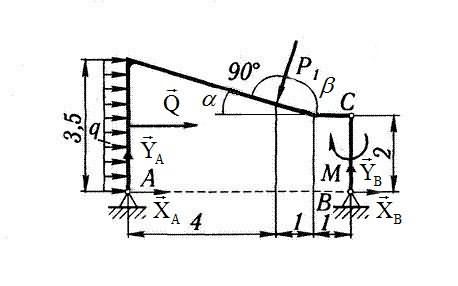
рис. 1.1
Составим 3 уравнения равновесия для всей конструкции в целом:

(1)

(2)
 (3)
(3)
Рассмотрим равновесие правой части конструкции.(рис 1.2)
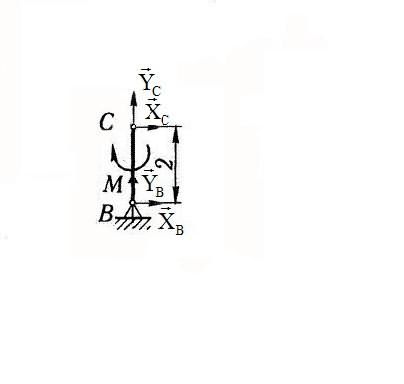
рис.1.2
Составим 3 уравнения равновесия для правой части конструкции:
 (4)
(4)
 (5)
(5)
 (6)
(6)
Из уравнения 3 находим YA
 кН
кН
Найдем Q:
 кН/м
кН/м
Найдем угол β:


Из уравнения 2 находим YB
 кН
кН
Из уравнения 6 находим XB
 кН
кН
Из уравнения 5 находим YC
 кН
кН
Из уравнения 4 находим XC
 кН
кН
Из уравнения 1 находим XA
 кН
кН
Составим уравнение проверки:



StudFiles.ru
Что такое Момент Силы
Виктор миргородский
Момент силы - произведение модуля силы на плечо этой силы относительно заданной оси. Момент силы характеризует вращательный эффект силы при действии ее на твердое тело.
Момент силы,
величина, характеризующая вращательный эффект силы при действии её на твёрдое тело; является одним из основных понятий механики. Различают М. с. относительно центра (точки) и относительно оси.
М. с. относительно центра О величина векторная. Его модуль Mo = Fh, где F - модуль силы, a h - плечо, т. е. длина перпендикуляра, опущенного из О на линию действия силы (см. рис.) ; направлен вектор Mo перпендикулярно плоскости, проходящей через центр О и силу, в сторону, откуда поворот, совершаемый силой, виден против хода часовой стрелки (в правой системе координат) . С помощью векторного произведения М. с. выражается равенством Mo = [rF], где r - радиус-вектор, проведённый из О в точку приложения силы. Размерность М. с. - L2MT2, единицы измерения - н×м, дин×см (1 н×м = 107 дин×см) или кгс×м.
М. с. относительно оси величина алгебраическая, равная проекции на эту ось М. с. относительно любой точки О оси или же численной величине момента проекции Рху силы F на плоскость ху, перпендикулярную оси z, взятого относительно точки пересечения оси с плоскостью. Т. е.
Mz = Mo cos g = ? Fxy h1.
Знак плюс в последнем выражении берётся, когда поворот силы F с положительного конца оси z виден против хода часовой стрелки (тоже в правой системе) . М. с. относительно осей x, y, z могут также вычисляться по формулам:
Mx = yFz - zFy, My = zFx - xFz, Mz = xFy - yFx,
где Fx, Fy, Fz - проекции силы F на оси; х, у, z - координаты точки А приложения силы.
Если система сил имеет равнодействующую, то её момент вычисляется по Вариньона теореме. 
Eva alex
Физика, механика. Момент - это сила, умноженная на плечо (т. е. расстояние до точки, относительно которой считается момент, до точки приложения силы) . Рычаг знаешь? Вот тебе простейший пример действия момента силы.
Пользователь удален
Смотря в какой области используется этот термин, если в машиностроении идругих областях где используется сборка металлических конструкций .то тогда момент сила скоторой Вы или устройство для затяжки болтов затягивает гайку или болт . показывает эту силу динамометрический ключ
Что такое момент силы и как определить его направление
Коротеев александр
Вот если тянешь за верёчку, к примеру - прилагаешь к ней силу.
А если берёшь какой-то прут и крутишь его вокруг продольной оси - поступательного движения нет, как охарактеризовать силу? Это и будет момент. Это сила, прикладываемая к вращению чего-то.
Поскольку всегда существует какой-то рычаг, то момент определяется через обычную силу и рычаг:
M = [ r, F ];
Это векторное произведение. Как известно, оно даёт новый вектор, который перпендикулярен обоим множителям. (!)Именно в таком порядке.
Соответственно, по правилу левой руки определяется направление момента силы.
Как и вектора угловой скорости.
>^.^<
Андрей савельев
Момент силы или крутящий момент это произведение величины проекции силы на плоскость перпендикулярную оси вращения на кратчайшее расстояние от линии действия силы до оси вращения.
Вектор момента введен искусственно, поэтому можно не заострять на нем внимание, чтобы не усложнять суть понятия.
Момент это мера усилия вращения. Измеряется в Н*М (ньютон умноженный на метр)
Читайте также
 Сила трения определение
Сила трения определение Сила ампера формула и определение
Сила ампера формула и определение Определение направления силы лоренца
Определение направления силы лоренца Определение момента силы относительно точки
Определение момента силы относительно точки Что такое сила в физкультуре определение
Что такое сила в физкультуре определение Автомобиль определение
Автомобиль определение Акт определение
Акт определение Административное право определение
Административное право определение Вес определение
Вес определение Анкета определение
Анкета определение База данных определение
База данных определение Бетон определение
Бетон определение
 Сила трения определение
Сила трения определение Сила ампера формула и определение
Сила ампера формула и определение Определение направления силы лоренца
Определение направления силы лоренца Определение момента силы относительно точки
Определение момента силы относительно точки Что такое сила в физкультуре определение
Что такое сила в физкультуре определение Автомобиль определение
Автомобиль определение Акт определение
Акт определение Административное право определение
Административное право определение Вес определение
Вес определение Анкета определение
Анкета определение База данных определение
База данных определение Бетон определение
Бетон определение