1.7. Моменты силы относительно точки и оси
Сила может не только перемещать тело поступательно, но и оказывать на него вращательное действие, которое зависит не только от величины силы, но и от расстояния до центра поворота.
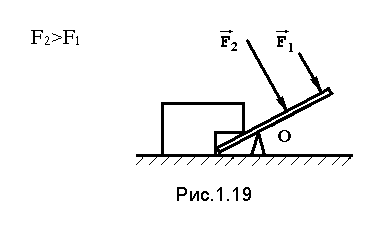
Например, для того, чтобы повернуть тело с помощью рычага (рис.1.19), наименьшую по модулю силу нужно приложить к концу рычага, чем ближе к центру, тем величина силы должна быть больше, если же сила будет проходить через точку О, то повернуть тело будет невозможно, какой большой бы она не была.
|
|
Для характеристики вращательного действия силы вводится понятие момента силы относительно точки.
Моментом силы относительно точки называется алгебраическая величина, равная произведению модуля силы на кратчайшее расстояние между точкой и линией действия силы (плечо):
![]() (1.5)
(1.5)
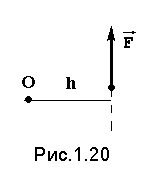
Знак момента определяется следующим образом: если сила стремится повернуть тело вокруг данной точки против часовой стрелки, то он считается положительным (рис.1.20), в противном случае - отрицательным.
Момент силы относительно точки равен нулю только в том случае, если линия действия силы проходит через данную точку. Единицы измерения момента [HM] и в соответствующих кратных единицах.
Момент силы относительно оси характеризует вращательное действие силы относительно оси. Если силу ![]() разложить на составляющие
разложить на составляющие![]() и
и![]() , одна из которых параллельна, а другая перпендикулярна оси Z (рис.1.21), то увидим, что сила
, одна из которых параллельна, а другая перпендикулярна оси Z (рис.1.21), то увидим, что сила![]() не способна повернуть тело вокруг оси, а вращательное действие силы
не способна повернуть тело вокруг оси, а вращательное действие силы![]() определится ее моментом относительно точки О.
определится ее моментом относительно точки О.
|
|

Следовательно, для определения момента силы относительно оси нужно силу спроектировать на плоскость, перпендикулярную оси и найти момент проекции относительно точки пересечения оси с этой плоскостью:
![]() (1.6)
(1.6)
Знак момента определяется следующим образом: момент считается положительным, если, глядя с положительного конца оси поворот тела будет виден против часовой стрелки. Момент силы относительно оси равен нулю, если сила параллельна оси или пересекает ее.
При определении момента силы относительно точки часто бывает затруднительно определить плечо силы. В этом случае можно воспользоваться теоремой Вариньона: момент равнодействующей плоской системы сил относительно точки равен алгебраической сумме моментов составляющих сил относительно той же точки.
![]() (1.7)
(1.7)
Аналогичная теорема применима и для определения момента силы относительно оси.
|
Пример: найти момент силы F = 10 H относительно точки А, если АВ=0,2 м, ВС=0,5 м (рис.1.22). Разложим силу F на две составляющих Fx=Fcos(30), Fy=Fsin(30). Тогда |
|
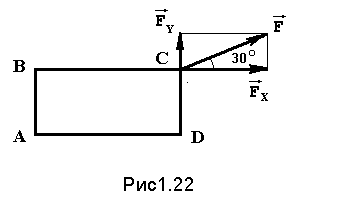
Тогда
![]()
или ![]()
1.8. Пара сил и ее свойства
|
Парой сил называется система, состоящая из двух сил, равных по модулю, противоположных по направлению и не лежащих на одной прямой (рис.1.23). |
|

Плоскость, в которой лежат силы пары называется плоскостью действия пары, а кратчайшее расстояние между силами пары называется плечом пары. Сумма сил пары равна нулю, поэтому пара сил не имеет равнодействующей, однако она оказывает на тело вращательное действие, характеризуемое ее моментом.
Моментом пары называется алгебраическая величина, модуль которой равен произведению одной из сил на плечо пары:
m = F1d = F2 d (1.8)
Момент пары считается положительным, если пара стремится повернуть тело против часовой стрелки и отрицательный, если пара стремится повернуть тело по часовой стрелке.
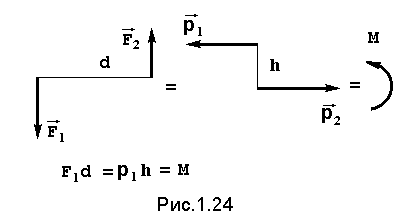
Эффект действия пары на твердое тело не зависит от ее положения в плоскости, поэтому ее можно переносить в плоскости действия в любое положение. Кроме того, не изменяя действия пары на тело, ее можно заменить другой парой с равным моментом. Поэтому часто пары изображают в виде круговой стрелки и называют пару сосредоточенным моментом (рис.1.24).
|
|
Поскольку действие пары определяется ее моментом, то если на
тело действует несколько пар, лежащих в одной плоскости, то их можно заменить одной парой с моментом, равным сумме моментов слагаемых пар: М=Mk. Отсюда следует условие равновесия системы пар, лежащих в одной плоскости: для равновесия системы пар необходимо и достаточно, чтобы алгебраическая сумма их моментов была равна нулю.
Mk=0 (1.9)
|
Отметим еще одно важное свойство пары сил: сумма моментов сил пары относительно любой точки равна моменту пары. Возьмем пару сил F1 и F2 и произвольную точку А (рис.1.25). |
|
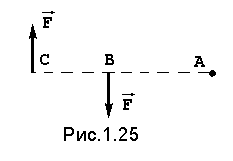
Тогда
![]()
StudFiles.ru
Моменты силы относительно точки и оси
Пусть имеются сила  , приложенная в точке какой-либо НМС, точка О и ось l. Тогда можно дать определения моментам силы относительно точки и оси и установить связь между ними.
, приложенная в точке какой-либо НМС, точка О и ось l. Тогда можно дать определения моментам силы относительно точки и оси и установить связь между ними.
1.3.1. Момент силы относительно точки
Определение: Моментом силы относительно точки называется вектор, приложенный в этой точке, равный по величине произведению величины силы на кратчайшее расстояние от точки до линии действия силы (называемое плечом), направленный перпендикулярно к плоскости, проходящей через точку и силу, по правилу правого винта, т. е. в ту сторону, откуда совершаемый силой поворот тела, относительно точки виден против хода часовой стрелки (рис. 6).

Рис. 6
 . (1.1)
. (1.1)
Введем в рассмотрение радиус-вектор , определяющий положение точки B – точки приложения силы (рис. 7).
, определяющий положение точки B – точки приложения силы (рис. 7).
Рис. 7
При рассмотрении векторного произведения векторов и , оказывается, что
а)  ;
;
б) 
 плоскости, в которой находятся
плоскости, в которой находятся  ;
;
в)  составляют правую тройку векторов, т. е. если смотреть с конца третьего вектора, поворот от первого ко второму вектору виден против хода часовой стрелки.
составляют правую тройку векторов, т. е. если смотреть с конца третьего вектора, поворот от первого ко второму вектору виден против хода часовой стрелки.
Таким образом, можно сделать следующий вывод:
 . (1.2)
. (1.2)
В случае плоской системы сил величину момента силы относительно точки, лежащей в плоскости действия сил, можно рассматривать как алгебраическую величину, равную взятому со знаком плюс или минус произведению модуля силы на плечо:
 .
.
При этом величина момента берется со знаком плюс, если сила стремится осуществить поворот тела относительно точки против хода часовой стрелки и со знаком минус в противоположном случае (рис. 8).
Рис. 8
1.3.2. Момент силы относительно оси
Определение: Моментом силы относительно оси называется взятая со знаком плюс или минус величина момента проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси и плоскости:
 . (1.3)
. (1.3)
Момент берется со знаком плюс, если, смотря с конца положительного направления оси, видно, что проекция силы стремится осуществить поворот тела относительно оси против хода часовой стрелки. В противном случае момент берется со знаком минус (рис. 9).
Рис. 9
Момент силы относительно оси не зависит от выбора плоскости, перпендикулярной оси.
Момент силы относительно оси равен нулю, если:
·  =0 , т.е. сила параллельна оси,
=0 , т.е. сила параллельна оси,
· h=0 , т.е. линия действия силы пересекает ось.
studopedia.ru
Момент силы относительно точки
Моментом силы относительно точки (алгебраическим) называют взятую с определенным знаком величину, которая равняется произведению модуля силы на плечо (рис. 2.1),т.е.:
МО  = ± F·h. (2.1)
= ± F·h. (2.1)

Рисунок 2.1
Здесь h = OC – плечо силы  относительно моментной точки, которое представляет собой кратчайшее расстояние между этой точкой и линией действия силы, измеренное по перпендикуляру.
относительно моментной точки, которое представляет собой кратчайшее расстояние между этой точкой и линией действия силы, измеренное по перпендикуляру.
Момент силы считается положительным, если сила пытается повернуть тело относительно точки против хода часовой стрелки и отрицательным –если по ходу часовой стрелки.
Момент силы относительно точки равен нулю, если линия действия силы походит через моментную точку.
Знак алгебраического момента выбирают в зависимости от направления поворота тела под действием силы. Момент силы считается положительным, если сила пытается повернуть тело относительно точки против хода часовой стрелки и отрицательным – при повороте по часовой стрелке. Свойства момента силы относительно точки:
1) момент силы относительно точки численно равняется удвоенной площади треугольника ОАВ, построенного на силе и моментной точке;
2) момент силы не зависит от переноса силы вдоль линии ее действия;
3) момент силы относительно точки равняется нулю, если линия действия силы проходит через моментную точку (тогда h = 0), или когда сама сила равняется нулю.
Для вычисления момента силы удобно пользоваться следующей Теоремой Вариньона о моменте равнодействующей:
Если система сил имеет равнодействующую, то момент равнодействующей относительно любой точки равняется сумме моментов сил системы относительно этой же точки.
Для плоской системы сил  , равнодействующая которой
, равнодействующая которой  , эта теорема математически описывается выражением:
, эта теорема математически описывается выражением:  .
.
studopedia.ru
1. Понятие алгебраического момента силы.
2. Момент силы относительно точки.
3. Теорема Вариньона для системы сходящихся сил.
-
Момент силы относительно оси.
1. То, что понятия силы явно недостаточно для решения многих задач механики, знали еще в Древней Греции. Новый элемент - произведение силы на ее расстояние до точки опоры, приводящий тело во вращение, был введен Архимедом при изложении им теории равновесия рычага. В современной трактовке, введенный Архимедом новый силовой фактор, называется алгебраическим моментом. К необходимости введения этого понятия мы приходим при попытке ответить, например, на следующий вопрос: при каком соотношении длин L1, L2 и весов P1, P2 невесомый стержень (рис. 1.21) будет находиться в равновесии в горизонтальном положении?
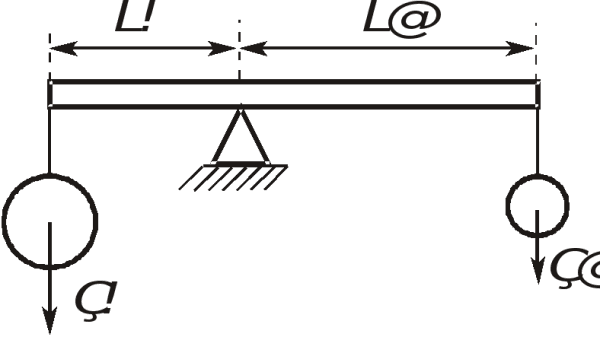
Рис. 1.21. К определению алгебраического момента
Ответ на этот вопрос следующий: стержень будет в равновесии, если:
P1L1= P2L2
или
P1L1- P2L2= 0.
Другими словами, при равновесии рычага должны быть равны произведения сил, расположенных справа и слева от точки опоры О, на кратчайшие расстояния от точки О до линий действия этих сил.
Если отвлечься от рассмотренной выше задаче о равновесии рычага, то алгебраический момент силы относительно произвольного центра О можно определить как взятое со знаком плюс или минус произведение модуля силы на плечо. При этом плечом называют кратчайшее расстояние от центра О до линии действия силы(рис. 1.22)
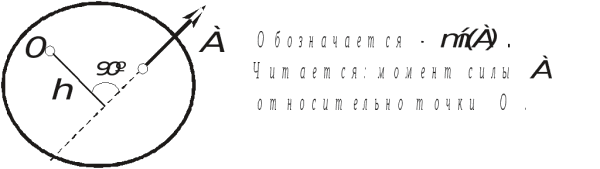
Рис. 1.22. К определению алгебраического момента
Правило знаков: если сила стремится повернуть тело, к которому она приложена, против часовой стрелки, то момент считается положительным, если по часовой - отрицательным. Понятия алгебраического момента вполне достаточно для описания действия на тело плоских систем сил. Для описания действия пространственной системы сил вводится понятие вектора-момента относительно точки и понятие осевого момента.
2. Момент силы относительно точки
Моментом силы ![]() относительно точкиО называется вектор
относительно точкиО называется вектор ![]() , равный векторному произведению
, равный векторному произведению ![]() , где
, где ![]() - радиус-вектор, определяющий положение точки приложения силы
- радиус-вектор, определяющий положение точки приложения силы ![]() относительно точкиO.
относительно точкиO.
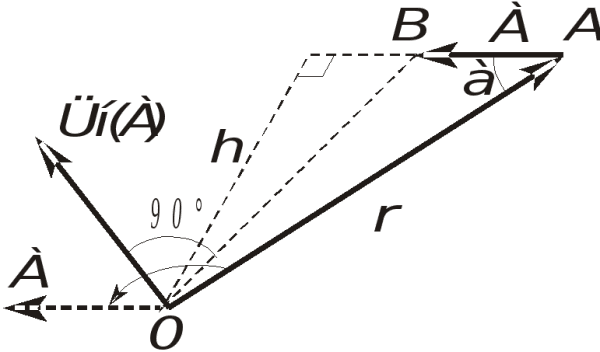
Рис. 1.23. К определению момента силы относительно точки
По определению векторного произведения вектор ![]() приложен в точкеO и направлен перпендикулярно плоскости, содержащей перемножаемые векторы ( плоскость треугольника OАВ) в ту сторону, откуда поворот от вектора
приложен в точкеO и направлен перпендикулярно плоскости, содержащей перемножаемые векторы ( плоскость треугольника OАВ) в ту сторону, откуда поворот от вектора ![]() к вектору
к вектору ![]() виден происходящим против хода часовой стрелки (рис.1.23). Модуль вектора-момента равен:
виден происходящим против хода часовой стрелки (рис.1.23). Модуль вектора-момента равен:
![]() ,
,
где h - плечо силы ![]() относительно точкиO.
относительно точкиO.
Введенный таким образом момент, полностью определяет вращательный эффект приложенной к телу силы: его линия действия определяет плоскость вращения, его направление - направление вращения, его модуль - интенсивность вращательного воздействия силы на тело.
-
Теорема Вариньона для системы сходящихся сил
Момент равнодействующей, относительно некоторой точки О, равен сумме моментов составляющих сил относительно той же точки.
Данная теорема справедлива для любой системы сил, имеющей равнодействующую. Приведем здесь ее доказательство для системы сходящихся сил.
Пусть ![]() является равнодействующей системы сходящихся сил
является равнодействующей системы сходящихся сил ![]() , т.е.
, т.е.
![]() .
.
Тогда по определению момента

что и требовалось доказать.
-
Момент силы относительно оси
Моментом силы относительно оси называется проекция на эту ось вектора момента данной силы относительно любой точки, лежащей на этой оси.
Пусть необходимо вычислить момент силы ![]() относительно осиZ. Выберем на этой оси (рис. 1.24) произвольную точку O и проведем через нее оси X и Y. По определению момент силы
относительно осиZ. Выберем на этой оси (рис. 1.24) произвольную точку O и проведем через нее оси X и Y. По определению момент силы ![]() относительно точкиO равен векторному произведению
относительно точкиO равен векторному произведению ![]() :
:
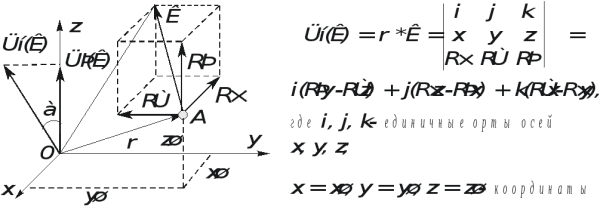
Рис. 1.24. Определение осевых моментов
Из векторной алгебры известно, что выражения, стоящие в скобках при единичных ортах ![]() представляют собой проекции векторного произведения на оси x, y, z соответственно:
представляют собой проекции векторного произведения на оси x, y, z соответственно:
![]() ,
,
![]() , (1.3)
, (1.3)
![]() .
.
Анализируя последнее из выражений (1.3) можно заметить, что оно не содержит координаты z. Это значит, что значение осевого момента Mz не зависит от выбора точки О на оси z. Отсутствие в данном выражении Rz говорит о том, что осевой момент создают лишь перпендикулярные данной оси составляющие силы. Это означает, что если сила параллельна какой-либо оси, то ее момент относительно этой оси равен нулю. Кроме того, отсюда же (и из теоремы Вариньона) следует простое правило вычисления осевых моментов:
Момент силы ™относительно какой-либо оси равен алгебраическому моменту проекции этой силы на плоскость, перпендикулярную этой оси, взятому относительно точки пересечения оси с плоскостью.
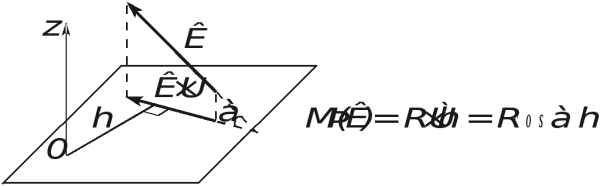
Рис. 1.25. Вычисление осевого момента
Момент будет иметь знак плюс, когда с положительного конца оси поворот, который стремится совершить сила ![]() , виден происходящим против хода часовой стрелки. Из рис. 1.25 видно, что если линия действия силы
, виден происходящим против хода часовой стрелки. Из рис. 1.25 видно, что если линия действия силы![]() , а, следовательно и силы
, а, следовательно и силы ![]() ,пересекает ось Z, то ее осевой момент будет равен нулю ( т.к. в этом случае h = 0 ).
,пересекает ось Z, то ее осевой момент будет равен нулю ( т.к. в этом случае h = 0 ).
Лекция 5
Вопросы
-
Сложение параллельных сил.
-
Пара сил и ее момент.
-
Теорема о параллельном переносе силы.
1. Рассмотрим вопрос о сложении двух параллельных и направленных в одну сторону сил (рис. 1.26)
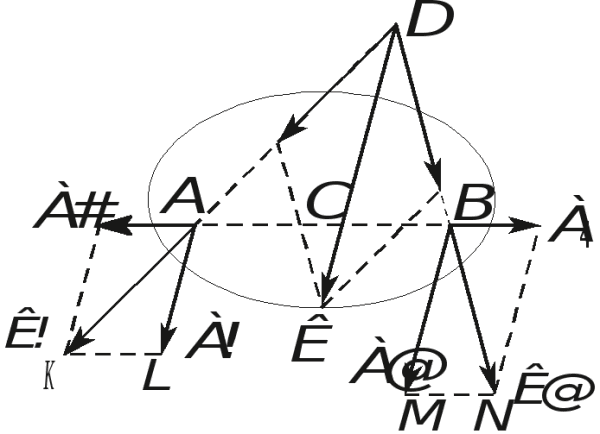
Рис. 1.26. Сложение двух параллельных сил, направленных в одну сторону
Пусть на твердое тело в точках А и В действуют параллельные силы ![]() и
и![]() (рис. 1.26). Приложим в этих точках уравновешенную систему двух равных по величине сил
(рис. 1.26). Приложим в этих точках уравновешенную систему двух равных по величине сил![]() и
и![]() и направленных вдольАВ в противоположные стороны. Заменим системы сил
и направленных вдольАВ в противоположные стороны. Заменим системы сил ![]() ,
,![]() и
и![]() ,
,![]() их равнодействующими
их равнодействующими![]() и
и![]() . Затем перенесем
. Затем перенесем![]() и
и![]() вдоль их линий действий в точкуD и заменим их одной силой К, являющейся равнодействующей сил А! и А@:
вдоль их линий действий в точкуD и заменим их одной силой К, являющейся равнодействующей сил А! и А@:
![]() .
.
Найдем линию действия силы ![]() . Из подобия треугольниковACD и BMN следует
. Из подобия треугольниковACD и BMN следует
 ,
,  .
.
Учитывая, что F3= F4, получаем 
или ![]() . (1.5)
. (1.5)
Таким образом, система двух параллельных и одинаково направленных сил имеет равнодействующую, равную сумме этих сил и направленную в ту же сторону.
Согласно (1.5), линия действия равнодействующей делит отрезок АВ на части, обратно пропорциональные величинам сил ![]() и
и![]() .
.
Аналогичным образом рассматривается случай сложения двух параллельных не равных по величине и противоположно направленных сил. Ниже приводятся без доказательства лишь результаты такого сложения.
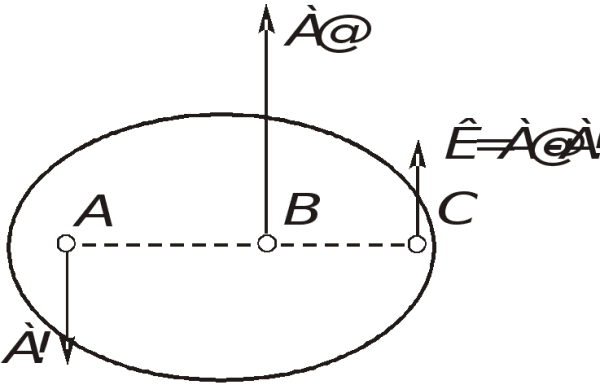
Рис. 1.27. Сложение двух параллельных и противоположно направленных сил
Изображенная на рис 1.27 система сил имеет равнодействующую ![]() , которая равна разности сил
, которая равна разности сил![]() и направлена в сторону большей по величине силы. Ее линия действия делит отрезокАВ на части обратно пропорциональные силам F1 и F2 внешним образом (точка С лежит за большей по величине силой F2 ):
и направлена в сторону большей по величине силы. Ее линия действия делит отрезокАВ на части обратно пропорциональные силам F1 и F2 внешним образом (точка С лежит за большей по величине силой F2 ): ![]() ,
, . (1.6)
. (1.6)
Еще раз обращаем внимание на то, что в рассматриваемом случае ![]()
2. Пара сил и ее момент
Займемся не рассмотренным в предыдущем пункте случаем, когда складываются две равные, параллельные, не лежащие на одной прямой и противоположно направленные.
Если использовать формулу (1.6) для вычисления равнодействующей такой системы сил, то мы получим ![]() , что казалось бы, должно означать уравновешенность данной системы сил. Вместе с тем, очевидно, что под действием такой системы сил тело начнет вращаться. Остается признать, что такая система является исключением среди систем двух параллельных сил и не имеет равнодействующей. Именно поэтому ее рассматривают как самостоятельный силовой фактор и называют парой сил.
, что казалось бы, должно означать уравновешенность данной системы сил. Вместе с тем, очевидно, что под действием такой системы сил тело начнет вращаться. Остается признать, что такая система является исключением среди систем двух параллельных сил и не имеет равнодействующей. Именно поэтому ее рассматривают как самостоятельный силовой фактор и называют парой сил.
Так как вращательный эффект сил характеризуется их моментом, вычислим момент пары сил относительно произвольного центра О, как сумму моментов отдельных сил пары (рис. 1.28)
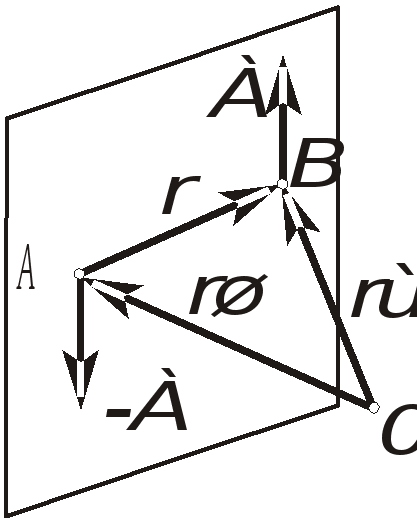
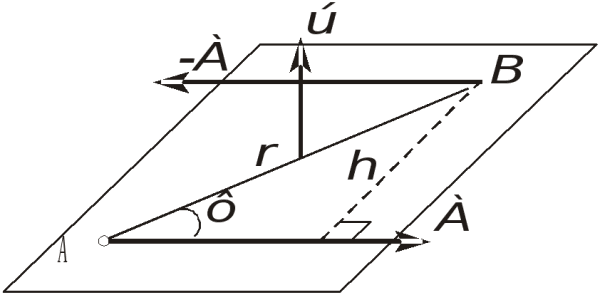
Рис. 1.28. К определению момента пары сил
![]()
![]() (1.7)
(1.7)
Данный результат означает, что момент пары сил не зависит от выбора точки О и равен моменту одной из сил пары относительно точки приложения другой силы, т.е.
![]() . (1.8)
. (1.8)
Модуль момента пары сил равен m= Frsin= Fh, где h - расстояние между линиями действия сил пары, называемое плечом пары. Вектор ![]() направлен перпендикулярно плоскости действия пары в ту сторону, откуда вращение видно против хода часовой стрелки.
направлен перпендикулярно плоскости действия пары в ту сторону, откуда вращение видно против хода часовой стрелки.
Из принятого определения момента пары, как суммы моментов отдельных сил пары относительно произвольного центра (1.7) и независимости момента пары сил от выбора центра О (1.8), следует:
a) две пары сил, имеющие одинаковые моменты, эквивалентны (т.е. оказывают на тело одинаковое механическое действие). Это означает, что две пары сил, независимо от их расположения в данной ( или в параллельной) плоскости, независимо от того, чему равны в отдельности модули их сил и плечи, будут эквивалентны, если будут равны их моменты;
б) момент пары является свободным вектором (т.е. его можно считать приложенным в любой точке тела).
Примеры эквивалентных по действию на тело пар сил (рис. 1.29):
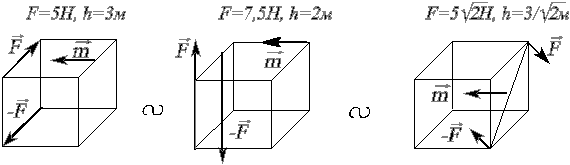
Рис. 1.29. Примеры эквивалентных по действию пар сил
в) если на тело действуют несколько пар сил, то сумма моментов всех сил, образующих эти пары, относительно любого центра будет равна геометрической сумме моментов отдельных пар сил и, следовательно, вся совокупность этих пар будет эквивалентна одной паре с моментом ![]() , (1.9)
, (1.9)
где ![]() - моменты отдельных пар сил.
- моменты отдельных пар сил.
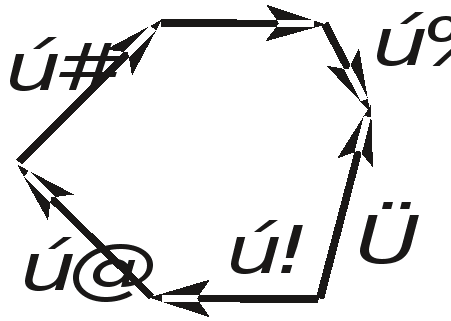
Рис. 1.22. Векторный многоугольник моментов пар сил
3.Теорема о параллельном переносе силы
Силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого ею действия, параллельно перенести в любую другую точку тела, добавив при этом пару сил с моментом, равным моменту переносимой силы относительно ее новой точки приложения. Докажем эту теорему.
Пусть в точке А приложена сила, которую мы хотим перенести в точку В. Приложим в точке В уравновешенную систему двух сил, равных по величине переносимой силе, как показано на рисунке. Заменив образовавшуюся при этом пару сил ![]() (которую называют присоединенной) ее моментом и перенеся данный момент, как свободный вектор, в точку В, получаем формулируемое в теореме утверждение.
(которую называют присоединенной) ее моментом и перенеся данный момент, как свободный вектор, в точку В, получаем формулируемое в теореме утверждение.

Рис. 1.24. Эквивалентные преобразование при параллельном переносе силы
Пример 1.
На барабан 1 радиуса r намотаны в противоположных направлениях две нити, к концам которых прикладывают силы ![]() и
и ![]() . На барабан 2 того же радиуса намотана одна нить, к которой прикладывают силу
. На барабан 2 того же радиуса намотана одна нить, к которой прикладывают силу ![]() (рис. 1.29). Рассмотрим, чем будут отличаться действия этих сил.
(рис. 1.29). Рассмотрим, чем будут отличаться действия этих сил.
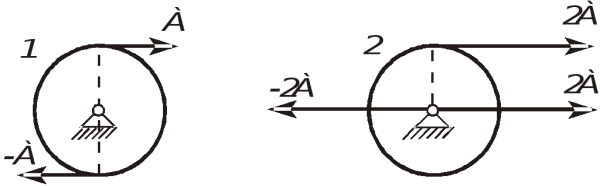
Рис. 1.29. Примеры действия пар сил
На барабан 1 действует только пара сил ![]() с моментом, численно равным2rF, вращающим барабан. Силу, действующую на барабан 2, можно заменить силой
с моментом, численно равным2rF, вращающим барабан. Силу, действующую на барабан 2, можно заменить силой ![]() , приложенной к оси барабана, и парой сил
, приложенной к оси барабана, и парой сил![]() с моментом2rF. Итак, оба барабана будут вращаться одинаково. Но при этом ось второго барабана будет испытывать давление, равное 2F, а ось первого барабана никакого давления не испытывает.
с моментом2rF. Итак, оба барабана будут вращаться одинаково. Но при этом ось второго барабана будет испытывать давление, равное 2F, а ось первого барабана никакого давления не испытывает.
Лекция 6
Вопросы
StudFiles.ru
Какая Формула для определения момента силы? Заранее спасибо
Mister user
Момент силы относительно точки:
Если имеется материальная точка Of, к которой приложена сила F, то момент силы относительно точки O равен векторному произведению радиус-вектора r, соединяющего точки O и Of, на вектор силы F.
Момент силы относительно оси:
Моментом силы относительно оси называется момент проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с этой плоскостью.
Векторным произведением вектора a на вектор b называется вектор c, удовлетворяющий следующим требованиям:
* длина вектора c равна произведению длин векторов a и b на синус угла между ними.
* вектор c ортогонален каждому из векторов a и b.
* вектор c направлен так, что тройка векторов {abc} является правой.
Таким образом, момент силы есть величина векторная. И вектор момента силы направлен так, чтобы из его конца вращение от а к b происходило против часовой стрелки.
Ну, думаю, я тебя здорово запутал. На практике эти все формулировки означают следующее.
Чтобы найти момент силы относительно точки, нужно:
- продлить мысленно линию действия силы вперед, или назад (по обстоятельствам) ,
- из точки вращения опустить перпендикуляр на линию действия силы, и найти его длину (вот тут как раз может пригодиться синус угла) .
- умножить силу на длину перпендикуляра в одной системе единиц. Получишь величину момента силы.
Но не забывай, что это вектор. Он всегда перпендикулярен плоскости вращения, то есть плоскости, проходящей через точку вращения и линию действия силы. И направлен в ту сторону от плоскости, чтобы вращение под действием силы вокруг точки было видно с его конца против часовой стрелки.
Читайте также
 Сила трения определение
Сила трения определение Точка определение
Точка определение Определение пикетажного положения нулевых точек
Определение пикетажного положения нулевых точек Определение документооборота с точки зрения информации
Определение документооборота с точки зрения информации Что такое сила в физкультуре определение
Что такое сила в физкультуре определение Акт определение
Акт определение База данных определение
База данных определение Болезнь определение
Болезнь определение Власть определение
Власть определение Генетическое определение пола кратко
Генетическое определение пола кратко Генетические механизмы определения пола
Генетические механизмы определения пола- Выберите один из вариантов определения истины это
 Сила трения определение
Сила трения определение Точка определение
Точка определение Определение пикетажного положения нулевых точек
Определение пикетажного положения нулевых точек Определение документооборота с точки зрения информации
Определение документооборота с точки зрения информации Что такое сила в физкультуре определение
Что такое сила в физкультуре определение Акт определение
Акт определение База данных определение
База данных определение Болезнь определение
Болезнь определение Власть определение
Власть определение Генетическое определение пола кратко
Генетическое определение пола кратко Генетические механизмы определения пола
Генетические механизмы определения пола