Содержание
Реферат
Курсовой проект содержит 27 страниц, 2 таблицы, 3 источников,
2 листа графического материала.
Механизм, подвижность, группа Ассура, скорость, ускорение, сила инерции, план, зубчатое колесо, модуль, эвольвента, скольжение, диаграмма.
Объектом проектирования является плоский рычажный четырехзвенный механизм и передача, состоящая из двух зубчатых колес.
Цель работы – закрепление теоретических знаний в области определения структуры механизма, кинематического и силового анализа, определение параметров и качественных показателей нулевого зубчатого зацепления.
Выполненные расчеты позволили определить скорости, ускорения, силы инерции звеньев механизма, построить планы сил для определения давлений в кинематических парах. Выполнить чертеж зубчатого зацепления.
Полученные результаты могут быть использованы при создании подобных рычажных механизмов в машинах и агрегатах.
Введение …………………………………………………………………………..5
1. Структурный анализ механизма ………..…………………………………… 6
1.1. Определение степени подвижности плоского механизма……………….. 6
1.2. Определение класса механизма……………………………………………..6
2. Кинематическое исследование плоского механизма………………………...8
2.1. Основные задачи и методы кинематического исследования механизма....8
2.2. Построение планов положений механизма …………………………….......9
2.3. Построение траекторий точек……………………………………………...10
2.4. Кинематическое исследование механизма методом графиков
(кинематических диаграмм) ……………………………………………………10
2.5. Определение скоростей точек механизма методом планов скоростей….12
2.6. Определение ускорений точек механизма методом планов ускорений…16
3. Силовое исследование механизма…………………………………………...20
3.1. Определение реакций в кинематических парах структурных групп…....20
4. Геометрический синтез прямозубого внешнего зацепления………………27
4.1. Определение размеров качественных характеристик и вычерчивание нулевого зацепления…………….……………………..………………………..27
4.2. Определение размеров качественных характеристик и вычерчивание неравносмещенного зацепления ……………………………………………….29
4.2.1. Определение коэффициентов смещения………………………………...29
4.3.Построение активной части линий зацепления, рабочих участков профилей зубьев и дуг зацепления……………………………………………..31
4.4 Определение качественных показателей зацепления……………………..32
Заключение……………………………………………………………………….35
Список использованных источников …………………………………………..36
Введение
Основной целью выполнения курсового проекта является изучение общих методов исследования и проектирования механизмов; применение знаний из ранее изученных дисциплин для конструирования, изготовления и эксплуатации машин и любой отрасли промышленности и транспорта.
Задачей данной работы является проведение структурного, кинематического и силового анализа механизма, построение диаграмм и выполнение чертежа зубчатого зацепления.
При выполнении графической части проекта использованы результаты проведенных расчетов.
Постановленные задачи решались с учетом действующих стандартов предприятия СТП ОмГУПС – 1.1 – 02 ОмГУПС – 1.2 – 02 и рекомендация, учитывающих опыт создания подобных устройств.
1. Структурный анализ механизма
-
Определение степени подвижности плоского механизма
Степень подвижности плоских механизмов определяется по формуле П. Л. Чебышева:
W = 3n – 2P5 – P4 (1.1)
где: W – степень подвижности механизма;
n – число подвижных звеньев механизма;
P5 – число кинематических пар пятого класса;
P4 – число кинематических пар четвертого класса.
Степень подвижности механизма определяет число ведущих его звеньев, т. е. количество звеньев, которым необходимо задать движение, чтобы все остальные звенья двигались по вполне определенным законам.
1.2. Определение класса механизма
Класс механизма в целом определяется классом самой сложной его структурной группы.
Механизм раскладывается на структурные группы, начиная с самого удаленного от ведущего звена. При этом всякий раз проверяется степень подвижности оставшегося механизма.
Механизм имеет пять подвижных звеньев, соединенных между собой семью кинематическими парами .
Определяем степень подвижности механизма по формуле:
W = 3n – 2P5 – P4, (1.2)
где n = 3; P5 = 4; P4 = 0,
тогда
W = 33 – 24 – 0 = 1.
Это значит, что в данном механизме должно быть одно ведущее звено. В качестве ведущего звена принимаем звено 1 – кривошип. Далее раскладываем механизм на структурные группы и, прежде всего,
отсоединяем самую удаленную от ведущего звена группу Ассура, состоящую
из звеньев 2 и 3 и трех вращательных кинематических пар – III, I, II . Степень подвижности этой группы после присоединения к стойке равна нулю:
W = 32 – 23 - 0 = 0.
Группа звеньев 2 и 3 является группой II класса.
После отсоединения указанной группы остался исходный механизм, состоящий из кривошипа (OA1), присоединенного к стойке вращательной парой I, и имеющий степень подвижности
W = 31 – 21 – 0 = 1.
Весь механизм является механизмом II класса. Структурная форма для данного механизма составляется в порядке образования механизма (ведущее звено и все группы Ассура по порядку):
[1] – [2; 3] .
StudFiles.ru
Структурный анализ механизма
Порядок анализа противоположен порядку синтеза (общий закон)
При структурном анализе механизма следует придерживаться следующего порядка:
1. Определяется степень подвижности механизма и указывается ведущее звено (звенья).
2. В наиболее удаленной от ведущего звена части механизма отсоединяется кинематическая цепь с наименьшим четным числом звеньев (предполагаемая группа). Изображаются отсоединенная и оставшаяся части механизма. Проверяется выполнение условий.
а) степень подвижности отсоединенной части механизма (предполагаемая группа) должна быть рана нулю, Wгр = 0;
б) оставшаяся часть должна быть механизмом с той же степенью подвижности, что и весь механизм до отсоединения группы.
При одновременном выполнении этих двух условий отсоединенная часть механизма является группой.
3. От оставшейся части механизма вновь отсоединяется кинематическая цепь с наименьшим четным числом звеньев. Изображаются отсоединенная и оставшаяся части механизма, и проверяется выполнение двух условий, указанных выше, и т.д. до тех пор, пока в оставшейся части механизма не останутся только простейший механизм 1-го класса.
4. Указывается порядок присоединения групп при образовании механизма. Он обратен порядку отсоединения.
5. Определяется класс, порядок и вид каждой группы.
6. Определяется класс всего механизма.
Класс механизма определяется по наивысшему классу группы, входящей в состав механизма.
В качестве примера рассмотрим структурный анализ качающегося конвейера.
Из структурной схемы механизма качающегося конвейера, приведенной на рисунке1 следует, что он состоит из следующих звеньев: АО1 – ведущее звено, 2 – шатун, 3 –коромысло, 4 – шатун, 5 – ползун (выходное звено).
Кинематические пары:
О1 -стойка О – кривошип 1 низшая 5 кл. вращательная
А- кривошип 1 – шатун 2 низшая 5 кл. вращательная
В- шатун 2 – коромысло 3 низшая 5 кл. вращательная
О3 - коромысло 3 - стойка О низшая 5 кл. вращательная
С- шатун 4 – коромысло 3 низшая 5 кл. вращательная
D- ползун 5 – шатун 4 низшая 5 кл. вращательная D- ползун 5 – стойка О низшая 5 кл поступательная
 |
Рисунок 1. Структурная схема механизма качающегося конвейера
Определяем степень подвижности всего механизма по формуле Чебышева для плоских шарнирно-рычажных механизмов (рис.1.)
W = 3×n – 2P5 – P4 = 3×5 - 2×7 – 0 = 1,
где n – количество подвижных звеньев,
P4 – количество кинематических пар 4-ого класса
P5 – количество кинематических пар 5-ого класса
Данная цепь является механизмом, так как степень подвижности W = 1, что соответствует числу заданных законов движения. Выделим группы Ассура. В наиболее удаленной части механизма качающегося конвейера отсоединяем четное число звеньев. Степень подвижности первой отсоединенной группы:
C 2 класс
2 порядок
2 вид
W = 3×n – 2P5 – P4 = 3×2 - 2×3 – 0 = 0
Степень подвижности равна нулю, следовательно, отсоединенная кинематическая цепь может быть группой Ассура.
Степень подвижности оставшейся части:
 |
Wост = 3×n – 2P5 – P4 = 3×3 – 2×4 – 0 = 1
Оставшаяся часть является механизмом, так как степень подвижности остатка равна единице, следовательно, отсоединенная кинематическая цепь является группой Ассура.
От оставшейся части вновь отсоединяем кинематическую цепь с наименьшим четным числом звеньев и проверяем те же условия.
 |
 2 класс
2 класс
2 порядок
1 вид
studopedia.ru
Структурный анализ механизмов
В современном машиностроении наиболее широкое распространение получили плоские механизмы, звенья которых входят в пары IV и V класса.
Задачей структурного анализа является построение структурной схемы, расчленение ее структурные единицы и определение класса групп Ассура и механизма в целом.
Любой механизм имеет одно неподвижное звено «стойку», начальное звено и присоединенные к ним цепи звеньев. Если механизм имеет одно начальное звено, степень его подвижности равна 1, если два начальных звена, подвижность равна 2 и т.д. Расчеты по формуле Чебышева дает те же результаты. Следовательно, присоединение к механизму последующих кинематических пар не меняет его подвижность, а значит, подвижность присоединенных пар должна быть равна 0.
Кинематическая цепь с нулевой степенью подвижности (свободы) относительно внешних кинематических пар, не распадающаяся на более простые цепи, называется группой Ассура (Wгр = 0).
Назовем условно начальное звено и стойку, образующие кинематическую пару пятого класса, механизмом первого класса. Тогда любой механизм состоит из механизма первого класса и присоединенных к нему групп Ассура.
Порядок группы Ассура определяется числом элементов звеньев, которыми группа присоединяется к основному механизму, а класс группы Ассура – наивысшим классом входящих в него контуров (таблица 1.1).
Таблица 1.1 − Классы и виды контуров
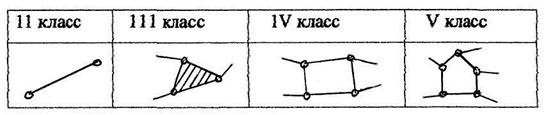
Класс всего механизма определяется наивысшим классом группы Ассура, входящей в данный механизм.
Структурный анализ механизма включает в себя:
1. Построение кинематической схемы механизма.
2. Нумерацию звеньев и обозначение буквами кинематических пар.
3. Подсчет подвижных звеньев и кинематических пар различного класса.
4. Определение подвижности механизма.
5. Построение структурной схемы механизма.
6. Расчленение механизма на структурные единицы.
7. Определение класса структурных единиц.
8. Определение класса всего механизма в целом.
Пример № 1. Выполнить структурный анализ рычажного механизма (рисунок 1.5).

Рисунок 1.5 − Схема рычажного механизма
Решение:
1. Обозначаем звенья цифрами (неподвижные 0, подвижные 1, 2, 3), а кинематические пары буквами (0, А, Б, 0 ).
2. Подсчитываем количество подвижных звеньев, имеем n = 3.
3. Определяем класс и число кинематических пар:
Все пары вращательные 5 класса, следовательно
Р5 = 4 (0.1; 1,2; 2,3; 3,0)
4. Определяем степень подвижности механизма по формуле Чебышева
W = 3n – 2P5 = 3 · 3 – 2 · 4 = 1, (1.7)
5. Строим структурную схему механизма (рисунок 1.6).
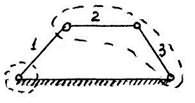
Рисунок 1.6 − Структурная схема рычажного механизма
6. Расчленяем механизм на структурные единицы и определяем их класс (рисунок 1.7).
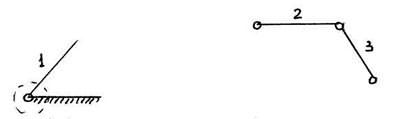
Механизм 1-го класса Группа Ассура 2 класса, 2 порядка
Рисунок 1.7 − Структурные единицы
7. Определяем класс всего механизма в целом. Класс механизма определяется наивысшим классом группы Ассура. В данном случае в механизм входит группа Ассура 2 класса, следовательно, механизм в целом относится к механизму второго класса.
Пример № 2. Выполнить структурный анализ рычажного механизма, состоящего из пяти подвижных звеньев (рисунок 1.8).
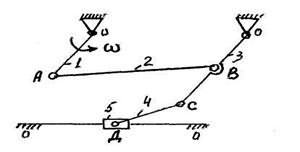
Рисунок 1.8 − Кинематическая схема пятизвенного механизма
Структурный анализ удобнее выполнять, используя вспомогательную таблицу, имеющую вид:
Таблица 1.2 − Кинематические пары, звенья и класс пар
| Кинемат. пары | 1V | V | V1 | V11 | |||
| №№ звеньев | 0,1 | 1,2 | 2,3 | 3,0 | 3,4 | 4,5 | 5,0 |
| Класс |
Из таблицы 1.2 следует, что: n=5, P5=7.
Тогда подвижность механизма будет равна:
W = 3n - 2 P5 = 3 · 5 – 2 · 7 = 1, (1.8)
Значит, механизм состоит из механизма первого класса и присоединенных к нему групп Ассура.
Строим структурную схему механизма и расчленяем на структурные единицы (рисунок 1.9).
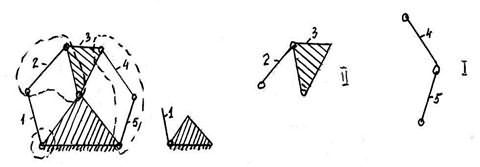
Структурная схема Механизм 1 класса Группы Ассура 2 класса
Рисунок 1.9 − Структурные единицы рычажного механизма
Выводы: Механизм состоит из механизма первого класса и двух групп Ассура второго класса 2-го порядка. Следовательно, в целом механизм относится к механизму второго класса.
Контрольные вопросы
1. Что называется механизмом?
2. Как классифицируются кинематические пары?
3. Какие кинематические пары относятся к низшим и к высшим?
4. Как определяется подвижность механизма, формула?
5. Что называется группой Ассура?
6. Как определяется класс гр. Ассура?
7. Цель и принцип построения заменяющего механизма.
8. Какова цель структурного анализа механизма, последовательность действия при анализе?
9. Как определяется класс всего механизма в целом?
studopedia.ru
2.6.Группы Ассура второго класса
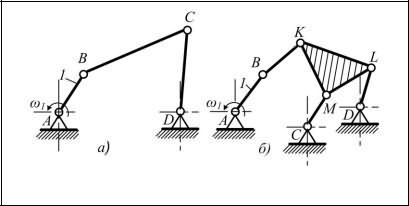
Рис. 5. Образование механизмов
а – второго класса; б – третьего класса
То есть класс механизма определяется классом наивысшей группы, в него входящей.
Итак, механизмы 2-гои3-гоклассов отличаются друг от друга не только видом кинематических цепей, которые составляют их ведомые части, но и методами их кинематического и динамического анализов. Чем выше класс механизма, тем больше усложняются методы их расчѐта и тем реже они встречаются в практике. Большинство современных механизмов, применяемых в технике, принадлежат к механизмам2-гокласса, включающим группы Ассура второго класса.
Взависимости от того, какие кинематические пары V класса входят в состав двухповодковой группы и как они группируются, различают пять видов двухповодковых групп (рис. 6).
15
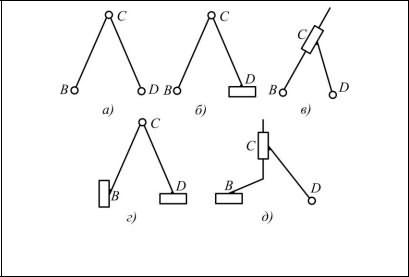
Рис. 6. Двухповодковые группы:
а– 1 вид; б – 2 вид;в – 3 вид;г – 4 вид;д – 5 вид
2.7.Определение класса механизма
При определении класса механизма необходимо указывать, какие из звеньев механизма являются ведущими, ибо в зависимости от выбора ведущих звеньев может изменяться класс механизма. Число ведущих звеньев определяют, используя структурную формулу Чебышева. Это дает возможность найти количество механизмов 1-гокласса. Условно отсоединяя их, выделяют ведомую часть механизма и расчленяют еѐ на группы Ассура. При расчленении можно придерживаться такой последовательности. Начинать надо с попытки отсоединить группы2-гокласса. Если попытки отсоединения групп2-гокласса не дадут решения, то надо переходить к попыткам отсоединения групп3-гокласса и т.д.
16
3.Кинематический анализ плоских рычажных механизмов с низшими
парами
Цель кинематического анализа механизмов – определение путей и траекторий движения отдельных точек и звеньев механизмов, их скоростей и ускорений.
Знание траекторий движения отдельных звеньев механизма и в особенности его исполнительных органов даѐт возможность судить о точности воспроизведения движений, необходимых тем процессам, для выполнения которых и создана данная машина.
Скорость перемещения рабочих звеньев машины определяет еѐ производительность и необходимую мощность двигателя; очень часто одним из основных требований, предъявляемых технологическим процессом к скорости движения рабочего звена, является изменение еѐ в заданных границах.
Задачи кинематического анализа механизмов могут быть решены аналитическим, графическим и графоаналитическим методами.
Аналитический метод является наиболее точным методом, однако из-засвоей сложности, малой наглядности и громоздкости применяется лишь при анализе простых механизмов.
Графический метод прост, нагляден, но не совершенен: результаты этого анализа из-замалой их точности могут быть использованы лишь при ориентировочных, грубых подсчѐтах.
Графоаналитический метод, благодаря своей универсальности, наглядности, точности и малой сложности, получил наибольшее применение в инженерной практике.
17
Достоинства и недостатки различных методов наглядно выявляются в ходе кинематического анализа рычажных механизмов.
3.1. Рычажные механизмы
Рычажные механизмы широко применяют в двигателях и рабочих машинах поршневого типа, насосах, компрессорах, в зуборезных и строгальных станках, сельскохозяйственных машинах, в дробилках, прессах и т.п.
Положительным качеством рычажных механизмов является простота их изготовления, надѐжность и высокий коэффициент полезного действия. К недостаткам надо отнести громоздкость рычажных механизмов.
Наиболее распространенными представителями рычажных механизмов являются: шарнирный четырехзвенник (рис. 7, а),кривошипно-ползунныймеханизм (рис. 7,б) и кулисный механизм (рис. 7,в).
18

Рис. 7. Рычажные механизмы:
а – шарнирный четырехзвенник;б –кривошипно-ползунныймеханизм;в – кулисный механизм
19
StudFiles.ru
/ Лекции от Чуфистова. 1 часть / lecture_tmm
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Теория механизмов и машин – это наука, рассматривающая вопросы анализа и синтеза механизмов и машин.
Механизм- система взаимосвязанных твердых тел, которая при заданном законе движения одних тел обеспечивает закон движения других тел.
Машина – один или несколько механизмов, снабженных системой управления и предназначенных для преобразования законов движения, энергии, информации и др. с целью замены физического или умственного труда человека.
Машины (механизмы) состоят из деталей.
Деталь- часть машины, полученная без применения сборочных операций.
Звено- это одна или несколько деталей, соединенных неподвижно (жестко).
В механизме имеется одно неподвижное звено- стойка и несколько подвижных звеньев. Звенья соединяются между собой с помощью кинематических пар.
Кинематическая пара - подвижное соединение двух звеньев.
Классификация кинематических пар
В пространстве любое тело имеет 6 степеней свободы (W), т.е. может совершать 6 независимых движений: 3 поступательных вдоль выбранных осей и 3 вращательных вокруг этих же осей. Величины соответствующих перемещений называют обобщенными координатами. Если такое тело связать с другим телом посредством кинематической пары, то это уменьшит его число степеней свободы на число наложенных связей (S), налагаемых другим телом. Число связей определяется видом кинематической пары. Значит, справедлива запись:
W+S=6

Классификация кинематических пар проводится по числу наложенных связей:
S=1, W=5 – кинематическая пара 1 класса
S=2, W=4 – кинематическая пара 2 класса
S=3, W=3 – кинематическая пара 3 класса
S=4, W=2 – кинематическая пара 4 класса
S=5, W=1 – кинематическая пара 5 класса
Более наглядно эту классификацию можно представить в виде таблицы:
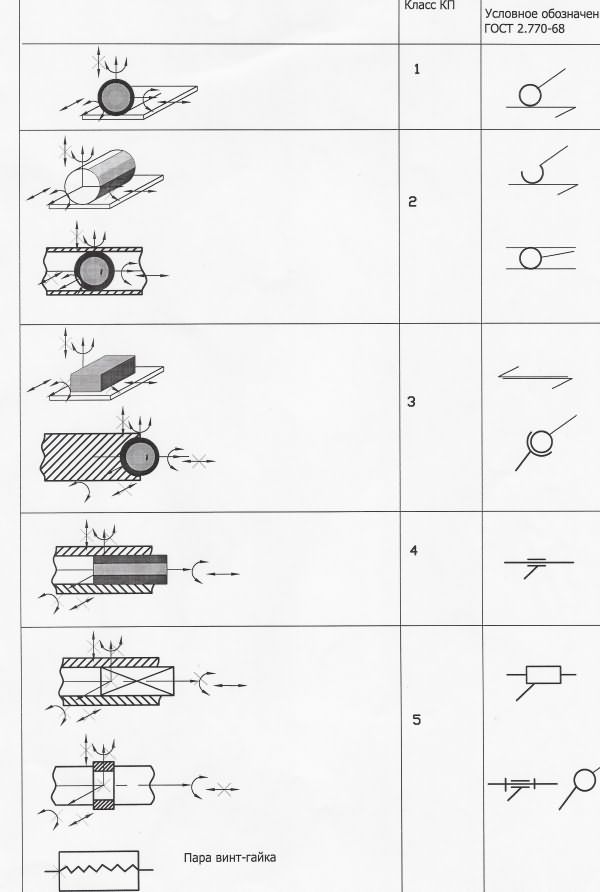
Кинематические пары, в которых касание происходит по точке или линии называются высшими кинематическими парами. К ним относятся кинематические пары 1-ого и 2-ого классов. Остальные же (кинематические пары 3-его, 4-ого и 5-ого классов) являются низшими.
Классификация звеньев
Звенья бывают простые и сложные, также подвижные и неподвижные. Неподвижное звено это стойка, а к подвижным относятся - все остальные звенья.

По закону вращения звенья делятся на:
1. Кривошип- звено, имеющее общую кинематическую пару со стойкой и совершающее полный оборот вокруг своей оси.
2. Коромысло- звено, имеющее общую кинематическую пару со стойкой и не совершающее полный оборот вокруг своей оси.
3. Ползун- звено, имеющее общую кинематическую пару со стойкой и совершающее прямолинейное возвратно-поступательное движение.
4. Шатун- звено, не имеющее общих кинематических пар со стойкой и совершающее сложное плоскопараллельное движение.
5. Кулиса- звено, совершающее вращательное движение и несущее на себе другое звено, называемое кулисным камнем.
6. Кулисный камень

Звенья, соединенные с помощью кинематических пар, образуют кинематическую цепь.
кинематическая цепь, присоединенная к стойке (незамкнутая кинематическая цепь):

кинематическая цепь, присоединенная к двум стойкам (замкнутая кинематическая цепь):
Механизм - кинематическая цепь, присоединенная к стойке.
Сложный механизм – механизм, который включает в себя сложное звено.
Пространственные и плоские механизмы
Пространственные механизмы - это те, звенья которых совершают движение в пространстве, а плоские - это те, звенья которых совершают движение в одной или нескольких параллельных плоскостях.
Формула А. П. Малышева для пространственных механизмов
Важнейшей характеристикой кинематической цепи является число степеней свободы.
Пусть кинематическая цепь содержит n звеньев. До того как они были соединены посредством кинематических пар, система из n звеньев имела 6n степеней свободы. Каждая кинематическая пара m класса дает m уравнений связей относительно координат. Разность между числом степеней свободы и числом уравнений связей дает число независимых координат - степеней подвижности механизма:
W= 6n - 1P1 - 2P2 - 3P3 - 4P4 - 5P5.
где n - число подвижных звеньев;
6n- общее число степеней свободы всех звеньев;
P1, P2, P3, Р4 , P5 – число кинематических пар от 1 до 5 класса;
W- степень подвижности механизма.
Формула П. Л. Чебышева для плоских механизмов
Для плоского механизма используется формула Чебышева:
W=3n-1P4-2P5
где n-число подвижных звеньев
P4,P5-кинематические пары с одной и с двумя наложенными связями.
По-другому эту формулу можно записать в следующем виде:
W=3n-2Pн-Pв
где n-общее число подвижных звеньев механизма
Рн - число низших кинематических пар
Рв – число высших кинематических пар
Структурный анализ механизма
План анализа:
-
Определение степени подвижности механизма (W-?)
-
Разбиение на структурные группы и определение их класса и порядка.
-
Запись формулы строения механизма.

Любой механизм (без избыточных связей) состоит из одного (нескольких) начальных механизмов и структурных групп.
Начальным звеном может быть объявлено любое звено, имеющее общую кинематическую пару со стойкой. Начальное звено обозначают стрелкой.
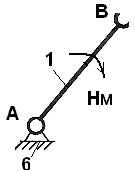
Под начальным механизмом понимают совокупность выбранного начального звена, стойки и соединяющей их кинематической пары.
На данном рисунке:
W=3![]() 5-2
5-2![]() 7-0=1
7-0=1
Степень подвижности равна 1.
Каждый механизм с W=1 можно рассматривать состоящим из механизма 1-го класса и присоединенных к нему структурных групп.
Под механизмом 1-го класса понимается начальное звено со стойкой. Механизм 1-го класса имеет W=1.
Структурная группа Асура
Структурной группой (группой Асура) называется такая группа звеньев, степень подвижности которой равна 0.
Кинематическая цепь - это система звеньев, образующих между собой кинематические пары.
-
Пусть Pв=0
тогда W=3n-2P=0
|
N |
Pн |
|
2 |
3 |
|
4 |
6 |
|
6 |
9 |
3n=2Pн
2) Если Pв есть, то заменяем высшие кинематические пары на низшие.
Модификация диад и их применение в механизмах
Диада содержит два звена и три кинематические пары. Известно пять модификаций диады, которые приведены на рисунке, расположенном ниже.
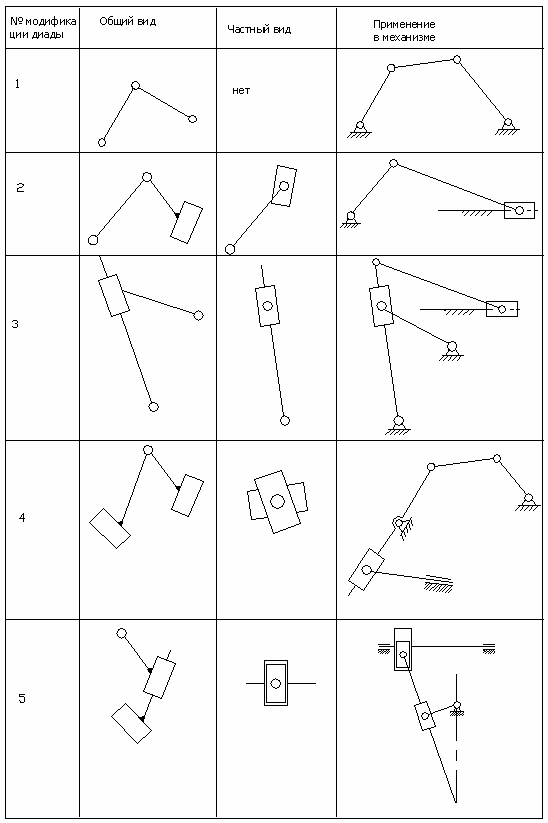
Но существуют структурные группы, которые не делятся на более мелкие. В этом случае определяется класс и порядок структурной группы и ее называют в соответствии с этими данными. Класс структурной группы определяется числом кинематических пар, входящих в наиболее сложный замкнутый контур, порядок- числом внешних кинематических пар.

Правила синтеза и анализа механизмов:
-
Структурная группа присоединяется к условному механизму внешними кинематическими парами.
-
Нельзя присоединять структурную группу к одному звену.
-
При присоединении или отсоединении структурных групп, степень подвижности меняться не должна.
-
Звенья нумеруются арабскими цифрами, начиная с начального механизма и по степени усложнения механизма.
-
Кинематические пары нумеруются латинским шрифтом, начиная с кинематической пары начального механизма.
Пример на анализ
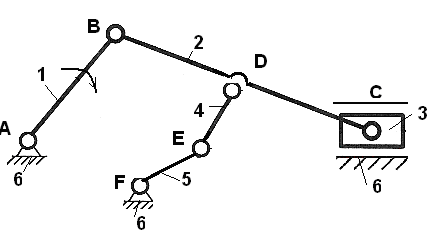
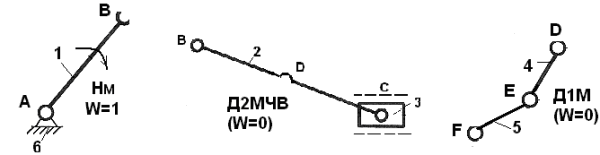
W=3n-2Рн-Рв
2. n=5; Рн=7; Рв=0
W=3·5-2·7-0=1
3. Формула строения механизма:
НМ+Д1М=Д2МЧВ
Пример на синтез
Под синтезом понимается проектирование механизма. Синтез представляет задачу обратную анализу. Н.М.+Д1М+Д4МЧВ+Д5М4В+Д2МЧВ+Н.М
Формула данного вида называется формулой строения.
По ней можно построить структурную схему механизма.
Где:
Н.М.- начальный механизм.
Д1М- диада 1-ой модификации
Д4МЧВ- диада 4-й модификации частного вида.
Д5МЧВ- диада 5-ой модификации частного вида.
Д2МЧВ- диада 2-ой модификации частного вида.
Избыточные или повторно наложенные связи механизма
Иногда при определенных длинах звеньев, наборе кинематических пар и их взаимном расположении одна или несколько кинематических пар отнимают у какого либо звена движение. В этом случае имеет место избыточная или повторная связь
Для избыточных связей вводится q.
Формула Малышева
W= 6n- 1P1-2P2-3P3-4P4-5P5+q
Формула Чебышева
W= 3n-2Pн-Pв+q
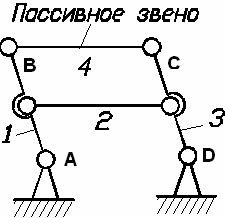
При определении Wнеобходимо учитывать возможность наличия так называемых «пассивных» звеньев, т.е. звеньев, устраняемых без формального ущерба для кинематики анализируемого механизма (рис.8).
а) W=3·4-2·6-0=0 – с пассивным звеном,
б) W=3·3-2·4-0=1 – фактически.
Кинематическое исследование рычажных механизмов
Механизмы с низшими парами находят широкое применение в технике. Их принято называть рычажными.
S=f1(t)
V=f2(t)
A=f3(t)
Существует три метода исследований:
-
Аналитический
-
Эксперимент
-
Графо-аналитический
Понятие о масштабном коэффициенте
Масштабный коэффициент (μ)- это величина равная отношению какой-либо величины в системе СИ к отрезку, обозначающему эту величину на чертеже.
Например:
StudFiles.ru
3.4. Построение планов скоростей и ускорений

определения численных значений скоростей, определяют
масштаб скоростей по формуле
V s , м с ;t H мм
с ;t H мм
д) аналогично графически дифференцируют график скорости и получают диаграмму ускорений a f t .
Определение скоростей и ускорений точек и звеньев механизма графоаналитическим методом ведется посредством построения планов скоростей и ускорений для отдельных положений механизма. Определение скоростей и ускорений начинается с ведущего звена, имеющего, как правило, свободу вращательного движения, т.е. являющегося кривошипом.
3.5. Определение скоростей и ускорений механизма первого класса
Как было отмечено выше, к механизмам 1-гокласса относятся механизмы, состоящие из стойки и ведущего звена. В нашем случае, ведущим звеном является кривошип. Движение кривошипа определяется заданной угловой скоростью, которая может быть либо равномерной, либо неравномерной. В случае равномерного вращательного
движения кривошипа (рис. 10, а) имеемVB 1 lAB и
aB12 lAB.
Скорость точки B направлена по касательной к траектории движения точки в сторону еѐ перемещения.
Ускорение точки B направлено вдоль звена к центру вращения, т.е. от точкиB к точкеA .
24
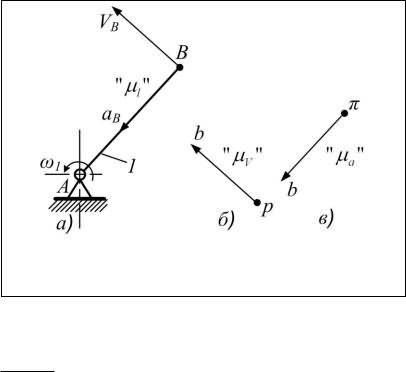
Так как построения, связанные с определением скоростей и ускорений движения отдельных точек, на самом звене производить неудобно, то построения эти ведут вне звена. Для этого при построении плана скоростей (рис. 10, б) выбирают точкуp – полюс, в которую в мас-
|
штабе V , |
м |
, переносят с сохранением направления |
|
|
с мм |
|||
и величины векторы скорости различных точек звена (в нашем примере вектор скорости точки B ).
Рис. 10. Построение планов скоростей и ускорений при равномерном вращении кривошипа
При построении плана ускорений (рис. 10, в) выбирают точку – полюс, в которую в масштабеа ,
м
с2 мм , переносят с сохранением направления и величи-
ны векторы ускорений различных точек звена.
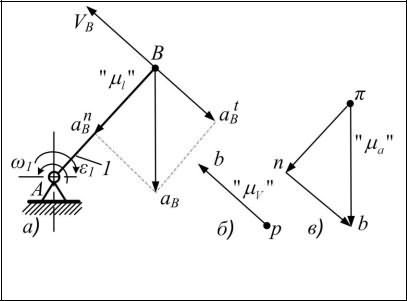
В случае неравномерного вращательного движения кривошипа (рис. 11) имеем
25
|
V |
l |
AB |
и a |
B |
a n a |
, |
где an |
2 l |
AB |
||
|
B |
1 |
B |
B |
B |
|||||||
|
– нормальное |
или |
центростремительное |
ускорение; |
||||||||
aB 1 lAB – тангенциальное или касательное ускорение (1 – угловое ускорение кривошипа).
Рис. 11. Построение планов скоростей и ускорений при неравномерном вращении кривошипа
Нормальное ускорение направлено всегда по нормали в сторону центра кривизны траектории движения данной точки; линия же действия тангенциального ускорения совпадает с касательной к траектории движения, а направление его устанавливается направлением углового ускорения.
Так как механизмы образованы последовательным присоединением групп Ассура к механизму 1-гокласса (или нескольким механизмам2-гокласса), то изложение метода планов можно вести применительно к различным группам Ассура.
26
 D , т.е.
D , т.е.
3.6. Определение скоростей группы Ассура второго класса первого вида
Известными являются векторы скоростей B иD концевых элементов группы, которыми звенья2 и3 входят во вращательные кинематические пары с ведущими звеньями1 и4 (рис. 12).
Рис. 12. Определение скоростей группы Ассура второго класса первого вида
Решение задачи начинается с определения линейной скорости точки C , так как движение точкиC может быть всегда разложено на переносное поступательное со скоростью точкиB илиD и относительное вращательное вокруг точкиB или
VCVBVBC, VCVDVCD.
Получаем VB VCB VD VCD .
В последнем уравнении известны по величине и направлению векторы VB иVD . Векторы жеVCB иVCD известны только по направлению, т.е. перпендикулярны звеньямCB иCD . Выбираем в качестве полюса плана
27

|
скоростей точку p , откладываем от неѐ |
отрезки ( pb) и |
|
( pd ) , представляющие скоростиVB иVD |
точек B иD в |
масштабе V . Отложив отрезки( pb) и( pd ) , проводим через точкиb иd прямые, имеющие направление векторов относительных скоростейVCB иVCD . Точка пересеченияc определит конец вектораVC абсолютной скорости точкиC . СкоростьVC выражается отрезком( pc) и равнаVC V ( pc) . Стрелки у векторов должны быть
поставлены так, чтобы удовлетворять уравнениям в векторной форме.
Пользуясь планом скоростей, можно определить
|
угловые скорости 2 |
и 3 звеньев2 и3. |
||||||||||
|
VCB |
V (cb) ; |
VCD |
V (cd ) . |
||||||||
|
2 |
3 |
||||||||||
|
lCB |
lCB |
lCD |
lCD |
||||||||
Направления угловых скоростей 2 и3 могут быть определены следующим образом. Мысленно прикладываем векторыVCB иVCD и видим, что вращение звена
2 происходит в направлении вращения часовой стрелки, а вращение звена3 в направлении, обратном вращению часовой стрелки.
Для определения скорости какой-либоточкиE имеем векторное уравнение
VEVBVEB.
Отрезок плана скоростей (eb) , определяющий скоростьVEB , совпадает по направлению с отрезком(cb) , определяющим скоростьVCB . Величину отрезка(eb) находят из следующих соображений:
28

|
VCB2 lCB; |
VEB2 lEB. |
Разделив почленно оба равенства, получим:
|
VEB |
lEB |
или |
V (eb) |
|||||
|
(eb) |
||||||||
|
V |
l |
CB |
||||||
|
CB |
V |
|||||||
|
откуда |
(eb) (cb) |
lEB |
. |
|||||
|
lCB |
||||||||
lEB, lCB
То есть, если известны скорости двух точек звена, то скорость других точек звена может быть определена из условия пропорциональности.
Отложив полученный отрезок (eb) на плане скоростей и соединив полученную точкуe с полюсом планаp , получаем отрезок( pe) , изображающий в масштабеV скорость точкиE , т.е.VE V ( pe) .
Для определения скорости какой-либопроизвольной точкиF звена3 составляем следующие векторные уравнения:
VFVDVFDи VFVCVFC.
Получаем VD VFD VC VFC .
Данное уравнение решаем графически. Рассматривая полученный треугольник cfd плана скоростей и треугольникCFD на звене3, можно видеть, что отрезки(cf ) ,( fd) и(dc) соответственно перпендикулярны отрезкамCF ,FD иDC , т.е. (cf )CF ;( fd) FD ;
(dc) DC.
29
StudFiles.ru
Определение степени подвижности механизма
Определение степени подвижности пространственной кинематической цепи
Пусть мы имеем n звеньев, из которых собирается кинематическая цепь. Пока звенья не соединены в кинематические пары, каждое из них имеет шесть степеней свободы (степеней подвижности). Все звенья до соединения в кинематическую цепь следовательно имели 6n степеней подвижности. После сборки звеньев в кинематическую цепь мы получим кинематические пары различных классов (с разными степенями подвижности). Предположим, что наша кинематическая цепь имеет кинематические пары всех пяти классов. Примем следующие обозначения:
Р5- количество кинематических пар пятого класса в образованной нами кинематической цепи,
Р4 - количество кинематических пар четвёртого класса,
Р3- количество кинематических пар третьего класса,
Р2- количество кинематических пар второго класса,
Р1- количество кинематических пар первого класса.
Каждая кинематическая пара ограничивает перемещение звеньев, отбирает у них столько степеней свободы, как её класс. Каждая кинематическая пара 5 класса отбирает у звеньев 5 степеней свободы. Все пары пятого класса отнимут у звеньев 5Р5 степеней свободы, четвёртого класса - 4Р4, третьего - 3Р3, второго - 2Р2, первого - 1Р1. Если из общего количества степеней свободы звеньев 6n вычесть все потерянные степени свободы, получим число степеней подвижности кинематической цепи W:
W=6n-5P5-4Р4-3Р3-2Р2-1P1. (1)
Степенью подвижности механизманазывается количество независимых координат, которые необходимо задать для определения положений звеньев механизма в системе координат, жестко связанной со стойкой.
Механизм отличается от кинематической цепи тем, что у него одно звено полностью закреплено. Закрепленное звено потеряло все шесть степеней свободы. Следовательно в механизме число подвижных звеньев равно n-1. Подставив в формулу (1) количество подвижных звеньев n-1, получим формулу для определения степени подвижности механизма:
W=6(n-1)-5P5-4Р4-3Р3-2Р2-1P1. (2)
Формула (2) впервые была получена Малышевым для пространственных механизмов.
Рассмотрим формулу Малышева для определения степени подвижности плоских механизмов. Все звенья плоского механизма могут иметь три степени подвижности, а кинематические пары соответственно могут иметь 1 или 2 степени подвижности. Если плоские кинематические пары рассматривать по классам, то они могут быть только пятого и четвёртого классов. При этом необходимо учесть, что общее количество степеней подвижности всех звеньев плоского механизма равно 3(n-1). Пары пятого класса теряют две степени подвижности, четвёртого –одну. Таким образом степень подвижности плоского механизма может быть определена по формуле:
W=3(n-1)-2P5-Р4. (3)
Формула (3) для определения степени подвижности плоского механизма впервые была получена Чебышевым П. Л.
В зависимости от числа общих условий связей, накладываемых на механизм, механизмы подразделяют на семейства.
Семейства механизмов и их структурные формулы приведены в таблице 1.
Таблица 2.1 Структурные формулы различных семейств механизмов
| Семейство | Структурная формула | Примечание |
| I II III IV | W=6(n-1)-5P5-4Р4-3Р3-2Р2-1P1 W=5(n-1)-4P5-3Р4-2Р3-Р2 W=4(n-1)-3P5-2Р4-Р3 W=3(n-1)-2P5-Р4 W=2(n-1)- P5 | Сомова- Малышева Чебышева Добровольского |
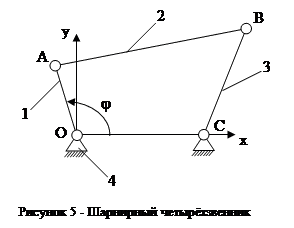
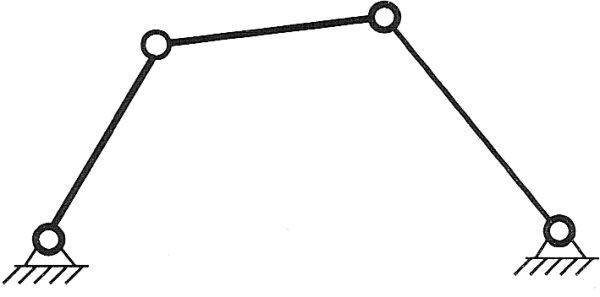
Рассмотрим применение структурной формулы Чебышева П. Л. на конкретном примере. На рисунке 5 изображен шарнирный четырёхзвенник.
1е- звено- кривошип- совершает вращательное движение вокруг оси О (полный оборот);
2е- звено АВ- шатун- совершает плоско- параллельное движение;
3е- звено ВС- коромысло (или балансир)- совершает возвратно- вращательное движение вокруг оси С (неполный оборот);
4е- звено ОС- стойка (станина)- неподвижное звено.
Количество звеньев n=4. Кинематические пары: 4-1, 1-2, 2-3, 3-4. Имеем 4 одноподвижные пары 5го класса. Относительное движение всех звеньев плоское. Механизм плоский. Определяем степень подвижности его по формуле Чебышева П. Л.:
W=3(n-1)-2P5-Р4=3(4-1)-2×4-0=1.
Механизм имеет степень подвижности равную 1. Это значит, что достаточно задать одну координату любому звену механизма в системе координат, жестко связанной со станиной, чтобы определить положения всех остальных звеньев. Например, в нашем случае достаточно задаться углом поворота кривошипа j1.
 Пассивные связи и избыточные звенья
Пассивные связи и избыточные звенья
Звенья и кинематические пары, которые не влияют на характер движения механизма в целом, называются избыточными (лишними) звеньями и парами, а обусловленные ими связи называются пассивными связями.
При определении степени подвижности механизма избыточные звенья и кинематические пары не должны учитываться.
В сложных стержневых механизмах не всегда на глаз можно определить степень подвижности. В этих случаях необходимо воспользоваться формулой Чебышева.
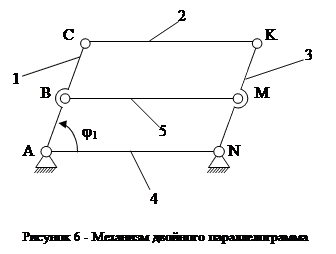
 Определим W механизма двойного параллелограмма (рисунок 6). Здесь АВ=ВС=КМ=MN; AN || BM || CK; AN=BM=CK и AС || KN. При таком соотношении звеньев механизм имеет W=1, т. е. достаточно задать положение звена 1 углом j1, чтобы определить положения всех остальных звеньев. Если зафиксировать звено 1 в любом положении, то остальные звенья будут неподвижны. Определим W по формуле Чебышева. Количество звеньев – n=5, кинематических пар 5го класса Р5=6, количество кинематических пар четвёртого класса - Р4=0.
Определим W механизма двойного параллелограмма (рисунок 6). Здесь АВ=ВС=КМ=MN; AN || BM || CK; AN=BM=CK и AС || KN. При таком соотношении звеньев механизм имеет W=1, т. е. достаточно задать положение звена 1 углом j1, чтобы определить положения всех остальных звеньев. Если зафиксировать звено 1 в любом положении, то остальные звенья будут неподвижны. Определим W по формуле Чебышева. Количество звеньев – n=5, кинематических пар 5го класса Р5=6, количество кинематических пар четвёртого класса - Р4=0.
W=3(n-1)-2P5-Р4=3(5-1)-2×6-0=0.
Если W=0, то должен быть не механизм, а жесткая ферма. Мы видим, что механизм может осуществлять движение. Если в этом механизме мысленно убрать звено 5 (или 2), то при этом характер движения остальных звеньев останется неизменным. Механизм превращается в обычный четырёхзвенник, W которого мы уже определили – W=1. При устранении звена 5 одновременно устраняется 2 кинематические пары: 5-1, 5-3. Следовательно, в этом механизме избыточными является одно звено и две кинематические пары.
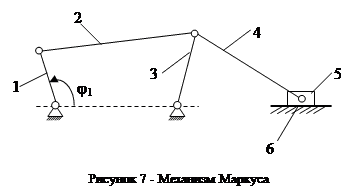
 Рассмотрим ещё один пример- механизм Маркуса , часто применяющийся в качестве привода качающегося конвейера (рисунок 7). Количество звеньев n=6. Кинематические пары: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 все пятого класса Р5=8, Р4=0.
Рассмотрим ещё один пример- механизм Маркуса , часто применяющийся в качестве привода качающегося конвейера (рисунок 7). Количество звеньев n=6. Кинематические пары: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 все пятого класса Р5=8, Р4=0.
Определим W по формуле Чебышева:
W=3(n-1)-2P5-Р4=3(6-1)-2×8-0=-1.
По схеме механизма видно, что он будет работать и W=1.
Пусть отсутствует непосредственное соединение звеньев 2-3. Звенья 3, 4, 5 всё равно займут положение, соответствующее углу поворота j1 звена 1, т. к. звенья 1, 2, 4 должны быть зафиксированы этим углом. То же самое можно получить, если удалить кинематическую пару 2-4 или 4-3. Здесь одна кинематическая пара избыточная. Её можно не учитывать. Тогда:
W=3(6-1)-2×7=1.
При этом замечаем, что устранение звена влечёт за собой устранение некоторых кинематических пар. Устранение кинематических пар (прекращение контакта звеньев) не влечёт за собой как неизбежное устранение входящих в неё звеньев.
Соединение звеньев, где соединяется 3 и более звеньев, называется узлом. В узле на одну кинематическую пару меньше, чем звеньев.
 Избыточные кинематические пары и звенья накладывают дополнительные условия на точность изготовления механизма, однако несмотря на это в механизм вводят иногда пассивное звено или лишнюю связь с целью получения каких либо дополнительных необходимых качеств; увеличение прочности, уменьшение трения и др.
Избыточные кинематические пары и звенья накладывают дополнительные условия на точность изготовления механизма, однако несмотря на это в механизм вводят иногда пассивное звено или лишнюю связь с целью получения каких либо дополнительных необходимых качеств; увеличение прочности, уменьшение трения и др.
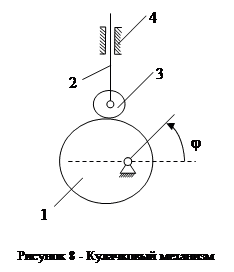
Определим W кулачкового механизма, изображенного на рисунке 2.8. Здесь звенья 1- кулачок, 2- толкатель, 3- ролик, 4- стойка. Количество звеньев n=4. Кинематические пары 1-4, 2-4, 2-3 пятого класса и 3-1 – высшая плоская кинематическая пара 4го класса.
При повороте кулачка на угол j толкатель займёт определённое положение. На первый взгляд W=1. Определим W по формуле Чебышева:
W=3(4-1)-2×3-2=2.
Здесь есть лишняя степень подвижности. Если бы ролик неподвижно закрепить с толкателем, то W механизма была бы равна единице. Поворот ролика по отношению к остальным звеньям не оказывает никакого влияния. Угол поворота ролика- это и есть лишняя степень свободы механизма.
Лишней степенью свободы называется такая степень свободы в движении некоторых звеньев, устранение которой не вызывает изменений в характере движения других звеньев по кинематическим соображениям.
При этом имеется в виду абсолютное или относительное движение звена. Устранение лишней степени свободы не влечёт за собой устранение звена.
Прежде чем пользоваться формулой Чебышева необходимо мысленно исключать из рассмотрения пассивные связи и лишние степени свободы.
Формула Чебышева в общем случае даёт правильный ответ. В общих случаях пассивные связи и лишние степени свободы не существуют и могут быть только в частных случаях.
Например: механизм двойного параллелограмма является частным случаем такого же механизма, когда звенья не параллельны (рисунок 9а); механизм Маркуса является частным случаем механизма, когда оси шарнирных соединений звеньев 2, 4 не совпадают (рисунок 9б); круглый ролик является более частным случаем геометрической формы ролика не круглой формы (рисунок 9в).
Таким образом формула Чебышева даёт возможность выявить характерные особенности (частности) механизмов.
studopedia.ru
Читайте также
 Генетические механизмы определения пола
Генетические механизмы определения пола Автомобиль определение
Автомобиль определение Вопросы определения
Вопросы определения База данных определение
База данных определение Власть определение
Власть определение Что значит класс обслуживания 2к в поезде
Что значит класс обслуживания 2к в поезде- Выберите один из вариантов определения истины это
 Болезнь определение
Болезнь определение- Актив определение
 Акт определение
Акт определение Бетон определение
Бетон определение Гражданская война определение
Гражданская война определение
 Генетические механизмы определения пола
Генетические механизмы определения пола Автомобиль определение
Автомобиль определение Вопросы определения
Вопросы определения База данных определение
База данных определение Власть определение
Власть определение Что значит класс обслуживания 2к в поезде
Что значит класс обслуживания 2к в поезде Болезнь определение
Болезнь определение Акт определение
Акт определение Бетон определение
Бетон определение Гражданская война определение
Гражданская война определение