Сила
У этого термина существуют и другие значения, см. Сила (значения). Размерность Единицы измерения СИ СГС Примечания| Сила | |
| F {\displaystyle \ F} | |
|
LMT−2 |
|
|
ньютон |
|
|
дина |
|
|
векторная величина |
|
| d ( m v → ) d t = F → {\displaystyle {\frac {\mathrm {d} (m{\vec {v}})}{\mathrm {d} t}}={\vec {F}}} Второй закон Ньютона |
||||||||
| История… | ||||||||
Фундаментальные понятия
|
||||||||
| См. также: Портал:Физика |
Си́ла — физическая величина, являющаяся мерой воздействия на данное тело со стороны других тел. Приложение силы обусловливает изменение скорости тела или появление деформаций и механических напряжений[1][2][3][4][5][6]. Деформация может возникать как в самом теле конечных размеров, так и в фиксирующих его объектах — например, пружинах.
Воздействие всегда осуществляется посредством полей, создаваемых телами и воспринимаемых рассматриваемым телом. Различные взаимодействия сводятся к четырём фундаментальным; согласно Стандартной модели физики элементарных частиц, эти фундаментальные взаимодействия (слабое, электромагнитное, сильное и, возможно, гравитационное) реализуются путём обмена калибровочными бозонами[3].
Для обозначения силы обычно используется символ F — от лат. fortis (сильный).
Важнейший физический закон, в который входит сила, — второй закон Ньютона. Он гласит, что в инерциальных системах отсчёта ускорение материальной точки по направлению совпадает с приложенной силой, а по модулю пропорционально модулю силы и обратно пропорционально массе материальной точки.
Слово «сила» в русском языке является многозначным и нередко используется (само или в сочетаниях, в науке и обиходных ситуациях) в смыслах, отличных от физического определения термина.
Общая информация
Характеристики силы
Сила является векторной величиной. Она характеризуется модулем, направлением и точкой приложения. Также используют понятие линия действия силы, означающее проходящую через точку приложения силы прямую, вдоль которой направлена сила.
Зависимость силы от расстояния между телами может иметь различный вид, однако, как правило, при больших расстояниях сила стремится к нулю — поэтому отдалением рассматриваемого тела от других тел с хорошей точностью обеспечивается ситуация «отсутствия внешних сил»[7]. Исключения возможны в некоторых задачах космологии, касающихся тёмной энергии[8].
Кроме разделения по типу фундаментальных взаимодействий, существуют иные классификации сил, в том числе: внешние—внутренние (то есть задаваемые извне и реакции связей), потенциальные и нет (потенциально ли поле изучаемых сил), упругие—диссипативные, сосредоточенные—распределённые (приложены в одной или многих точках), постоянные или переменные во времени.
При переходе из одной инерциальной системы отсчёта в другую преобразование сил осуществляется так же, как и полей соответствующей природы (например, электромагнитных, если сила электромагнитная). В пределе малых скоростей можно считать силу инвариантом.
Размерность силы
Размерность силы в Международной системе величин (англ. International System of Quantities, ISQ), на которой базируется Международная система единиц (СИ), и в системе величин LMT, используемой в качестве основы для системы единиц СГС, — LMT−2. Единицей измерения в СИ является ньютон (русское обозначение: Н; международное: N), в системе СГС — дина (русское обозначение: дин, международное: dyn).
Равнодействующая сила
Если к не закреплённому телу приложено несколько сил, то каждая из них сообщает телу такое ускорение, какое она сообщила бы в отсутствие действия других сил. Это утверждение, основанное на опытных фактах, носит название принципа независимости действия сил (принципа суперпозиции). Поэтому при расчёте ускорения тела все действующие на него силы заменяют одной силой, называемой равнодействующей, а именно геометрической суммой всех действующих сил. В частном случае равенства равнодействующей силы нулю ускорение тела также будет нулевым. На этом основано измерение величины исследуемой силы, когда она компенсируется силой, величина которой известна.
Измерение сил
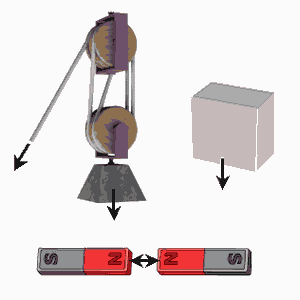
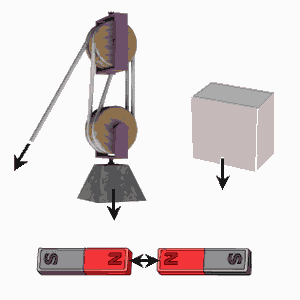
Для измерения сил используются два метода: статический и динамический[1].
- Статический метод заключается в уравновешивании измеряемой силы другой силой, значение которой известно. Например, в качестве уравновешивающей силы может выступать сила упругости, возникающая в градуированной пружине, деформированной исследуемой силой. На использовании статического метода основаны приборы, называемые динамометрами.
- Динамический метод основан на использовании уравнения второго закона Ньютона m a → = F → {\displaystyle m{\vec {a}}={\vec {F}}} . Уравнение позволяет найти силу F → {\displaystyle {\vec {F}}} , действующую на тело, если известны масса тела m {\displaystyle m} и ускорение a → {\displaystyle {\vec {a}}} его поступательного движения относительно инерциальной системы отсчёта.
История понятия
Понятие силы использовали ещё ученые античности в своих работах о статике и движении. Изучением сил в процессе конструирования простых механизмов занимался в III в. до н. э. Архимед[9].
Представления Аристотеля о силе, связанные с фундаментальными несоответствиями, просуществовали в течение нескольких столетий. Эти несоответствия устранил в XVII в. Исаак Ньютон, использовав для описания силы математические методы. Механика Ньютона оставалась общепринятой на протяжении почти трехсот лет[5]. К началу XX в. Альберт Эйнштейн в теории относительности показал, что ньютоновская механика верна лишь при сравнительно небольших скоростях движения и массах тел в системе, уточнив тем самым основные положения кинематики и динамики и описав некоторые новые свойства пространства-времени.
 Объединяет все силы то, что они вызывают ускоренное движение массивных тел и возникновение в этих телах деформаций.
Объединяет все силы то, что они вызывают ускоренное движение массивных тел и возникновение в этих телах деформаций.
Ньютоновская механика
Основная статья: Законы НьютонаНьютон задался целью описать движение объектов, используя понятия инерции и силы. Сделав это, он попутно установил, что всякое механическое движение подчиняется общим законам сохранения. В 1687 г. Ньютон опубликовал свой знаменитый труд «Математические начала натуральной философии», в котором изложил три основополагающих закона классической механики (законы Ньютона)[5][10].
Первый закон Ньютона
Основная статья: Первый закон НьютонаПервый закон Ньютона утверждает, что существуют системы отсчета, в которых тела сохраняют состояние покоя или равномерного прямолинейного движения при отсутствии действий на них со стороны других тел или при взаимной компенсации этих воздействий[10]. Такие системы отсчета называются инерциальными. Ньютон предположил, что каждый массивный (подразумевается: «обладающий массой», а не «громоздкий») объект имеет определённый запас инерции, характеризующий «естественное состояние» движения этого объекта. Эта идея отрицает взгляд Аристотеля, который рассматривал только покой «естественным состоянием» объекта. Первый закон Ньютона противоречит аристотелевской физике, одним из положений которой является утверждение о том, что тело может двигаться с постоянной скоростью лишь под действием силы. Тот факт, что в механике Ньютона в инерциальных системах отсчёта покой неотличим от равномерного прямолинейного движения, является обоснованием принципа относительности Галилея. Среди совокупности тел принципиально невозможно определить, какие из них находятся «в движении», а какие «покоятся». Говорить о движении можно лишь относительно конкретной системы отсчета. Законы механики выполняются одинаково во всех инерциальных системах, другими словами, все они механически эквивалентны. Последнее следует из так называемых преобразований Галилея[11].
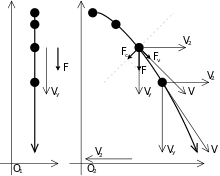 Прямолинейное равномерно ускоряющееся движение в одной инерциальной системе в общем случае будет параболическим в другой равномерно двигающейся инерциальной системе отсчёта.
Прямолинейное равномерно ускоряющееся движение в одной инерциальной системе в общем случае будет параболическим в другой равномерно двигающейся инерциальной системе отсчёта.
Например, законы механики абсолютно одинаково выполняются в кузове грузовика, когда тот едет по прямому участку дороги с постоянной скоростью и когда стоит на месте. Человек может подбросить мячик вертикально вверх и поймать его через некоторое время на том же самом месте вне зависимости от того, движется ли грузовик равномерно и прямолинейно или покоится. Для него мячик летит по прямой. Однако для стороннего наблюдателя, находящегося на земле, траектория движения мячика имеет вид параболы. Это связано с тем, что мячик относительно земли движется во время полета не только вертикально, но и горизонтально по инерции в сторону движения грузовика. Для человека, находящегося в кузове грузовика, не имеет значения, движется ли последний по дороге, или окружающий мир перемещается с постоянной скоростью в противоположном направлении, а грузовик стоит на месте. Таким образом, состояния покоя и равномерного прямолинейного движения физически неотличимы друг от друга.
Второй закон Ньютона
Основная статья: Второй закон Ньютона Хотя второй закон Ньютона традиционно записывают в виде: F → = m a → {\displaystyle \scriptstyle {{\vec {F}}=m{\vec {a}}}} , сам Ньютон записывал его несколько иначе[как?]
Хотя второй закон Ньютона традиционно записывают в виде: F → = m a → {\displaystyle \scriptstyle {{\vec {F}}=m{\vec {a}}}} , сам Ньютон записывал его несколько иначе[как?]
Второй закон Ньютона в современной формулировке звучит так: в инерциальной системе отсчета скорость изменения импульса материальной точки равна векторной сумме всех сил, действующих на эту точку.
d p → d t = F → , {\displaystyle {\frac {d{\vec {p}}}{dt}}={\vec {F}},}где p → {\displaystyle {\vec {p}}} − импульс материальной точки, F → {\displaystyle {\vec {F}}} − суммарная сила, действующая на материальную точку. Второй закон Ньютона гласит, что действие несбалансированных сил приводит к изменению импульса материальной точки[10].
По определению импульса:
d p → d t = d ( m v → ) d t , {\displaystyle {\frac {d{\vec {p}}}{dt}}={\frac {d(m{\vec {v}})}{dt}},}где m {\displaystyle m} − масса, v → {\displaystyle {\vec {v}}} − скорость.
В классической механике при скоростях движения много меньше скорости света масса материальной точки считается неизменной, что позволяет выносить её при этих условиях за знак дифференциала:
m d v → d t = F → . {\displaystyle m{\frac {d{\vec {v}}}{dt}}={\vec {F}}.}С учётом определения ускорения точки, второй закон Ньютона принимает вид:
m a → = F → . {\displaystyle m{\vec {a}}={\vec {F}}.}Считается, что это «вторая самая известная формула в физике», хотя сам Ньютон никогда явным образом не записывал свой второй закон в этом виде. Впервые данную форму закона можно встретить в трудах К. Маклорена и Л. Эйлера.
Поскольку в любой инерциальной системе отсчёта ускорение тела одинаково и не меняется при переходе от одной системы к другой, сила тоже инвариантна по отношению к такому переходу.
Во всех явлениях природы сила, независимо от своего происхождения, проявляется только в механическом смысле, то есть как причина нарушения равномерного и прямолинейного движения тела в инерциальной системе координат. Обратная ситуация, а именно установление факта такого движения, свидетельствует не об отсутствии действующих на тело сил, а лишь о том, что действия этих сил взаимно уравновешиваются. Иначе: их векторная сумма есть вектор с модулем, равным нулю.
Второй закон Ньютона не играет роль определения силы, но позволяет находить её величину. Например, знание массы планеты и её центростремительного ускорения при движении по орбите позволяет вычислить величину силы гравитационного притяжения, действующую на эту планету со стороны Солнца.
Третий закон Ньютона
Основная статья: Третий закон НьютонаДля любых двух тел (назовем их тело 1 и тело 2) третий закон Ньютона утверждает, что сила действия тела 1 на тело 2 сопровождается появлением равной по модулю, но противоположной по направлению силы, действующей на тело 1 со стороны тела 2[12]. Математически закон записывается так:
F → 1 , 2 = − F → 2 , 1 . {\displaystyle {\vec {F}}_{1,2}=-{\vec {F}}_{2,1}.}Этот закон означает, что силы всегда возникают парами «действие-противодействие»[10]. Если тело 1 и тело 2 находятся в одной системе, то суммарная сила в системе, обусловленная взаимодействием этих тел, равна нулю:
F → 1 , 2 + F → 2 , 1 = 0. {\displaystyle {\vec {F}}_{1,2}+{\vec {F}}_{\mathrm {2,1} }=0.}Это означает, что в замкнутой системе не существует несбалансированных внутренних сил. Это приводит к тому, что центр масс замкнутой системы (то есть такой, на которую не действуют внешние силы) не может двигаться с ускорением. Отдельные части системы могут ускоряться, но лишь таким образом, что система в целом остаётся в состоянии покоя или равномерного прямолинейного движения. Однако, в случае, если внешние силы подействуют на систему, её центр масс начнёт двигаться с ускорением, пропорциональным внешней результирующей силе и обратно пропорциональным массе системы[3].
Кроме того, так как силы взаимодействия всегда направлены вдоль прямой, соединяющей взаимодействующие точки, равен нулю и суммарный момент этих сил (относительно любой точки):
( r → 1 − r → 0 ) × F → 1 , 2 + ( r → 2 − r → 0 ) × F → 2 , 1 = ( r → 1 − r → 2 ) × F → 1 , 2 = 0 {\displaystyle ({\vec {r}}_{1}-{\vec {r}}_{0})\times {\vec {F}}_{1,2}+({\vec {r}}_{2}-{\vec {r}}_{0})\times {\vec {F}}_{\mathrm {2,1} }=({\vec {r}}_{1}-{\vec {r}}_{2})\times {\vec {F}}_{1,2}=0}Фундаментальные взаимодействия
Основная статья: Фундаментальные взаимодействияВсе силы в природе основаны на четырёх типах фундаментальных взаимодействий. Максимальная скорость распространения всех видов взаимодействия равна скорости света в вакууме. Электромагнитные силы действуют между электрически заряженными телами, гравитационные − между массивными объектами. Сильное и слабое проявляются только на очень малых расстояниях, они ответственны за возникновение взаимодействия между субатомными частицами, включая нуклоны, из которых состоят атомные ядра.
Интенсивность сильного и слабого взаимодействия измеряется в единицах энергии (электрон-вольтах), а не единицах силы, и потому применение к ним термина «сила» объясняется существующей с античности традицией объяснять любые явления в окружаемом мире действием специфических для каждого явления «сил».
Понятие силы не может быть применено по отношению к явлениям субатомного мира. Это понятие из арсенала классической физики, ассоциирующейся (пусть даже только подсознательно) с ньютоновскими представлениями о силах, действующих на расстоянии. В субатомной физике таких сил уже нет: их заменяют взаимодействия между частицами, происходящие через посредство полей, то есть каких-то других частиц. Поэтому физики высоких энергий избегают употреблять слово сила, заменяя его словом взаимодействие[13].
Взаимодействие каждого типа обусловлено обменом соответствующими «переносчиками»: электромагнитное — виртуальными фотонами, слабое — векторными бозонами, сильное — глюонами (а на больших расстояниях — мезонами). В отношении гравитационного взаимодействия имеются теоретические предположения (например, в теории струн или М-теории), что с ним также может быть связан свой переносчик-бозон, называемый гравитоном, но его существование пока не доказано. Эксперименты по физике высоких энергий, проведённые в 70−80-х годах XX в., подтвердили идею о том, что слабое и электромагнитное взаимодействия являются проявлениями более глобального электрослабого взаимодействия[14]. В настоящее время делаются попытки объединения всех четырёх фундаментальных взаимодействие в одно (так называемая теория великого объединения).
Всё многообразие проявляющих себя в природе сил в принципе может быть сведено к этим четырём фундаментальным взаимодействиям. Например, трение − это проявление электромагнитных сил, действующих между атомами двух соприкасающихся поверхностей, и принципа запрета Паули[15], который не позволяет атомам проникать в область друг друга. Сила, возникающая при деформации пружины, описываемая законом Гука, также является результатом действия электромагнитных сил между частицами и принципа запрета Паули, заставляющих атомы кристаллической решетки вещества удерживаться около положения равновесия[3].
Однако на практике оказывается не только нецелесообразной, но и просто невозможной по условиям задачи подобная детализация рассмотрения вопроса о действии сил.
Гравитация
Основная статья: ГравитацияГравитация (сила тяготения) — универсальное взаимодействие между любыми видами материи. В рамках классической механики описывается законом всемирного тяготения, сформулированным Ньютоном в уже упомянутом труде «Математические начала натуральной философии». Ньютон получил величину ускорения, с которым Луна движется вокруг Земли, положив при расчете, что сила тяготения убывает обратно пропорционально квадрату расстояния от тяготеющего тела. Кроме этого, им же было установлено, что ускорение, обусловленное притяжением одного тела другим, пропорционально произведению масс этих тел[16]. На основании этих двух выводов был сформулирован закон тяготения: любые материальные частицы притягиваются по направлению друг к другу с силой F {\displaystyle F} , прямо пропорциональной произведению масс ( m 1 {\displaystyle m_{1}} и m 2 {\displaystyle m_{2}} ) и обратно пропорциональной квадрату расстояния r {\displaystyle r} между ними:
F = G m 1 m 2 R 2 . {\displaystyle F=G{\frac {m_{1}m_{2}}{R^{2}}}.}Здесь G {\displaystyle G} − гравитационная постоянная[17], значение которой впервые получил в своих опытах Генри Кавендиш. Используя данный закон, можно получить формулы для расчета силы тяготения тел произвольной формы. Теория тяготения Ньютона хорошо описывает движение планет Солнечной системы и многих других небесных тел. Однако, в её основе лежит концепция дальнодействия, противоречащая теории относительности. Поэтому классическая теория тяготения неприменима для описания движения тел, перемещающихся со скоростью, близкой к скорости света, гравитационных полей чрезвычайно массивных объектов (например, черных дыр), а также переменных полей тяготения, создаваемых движущимися телами, на больших расстояниях от них[18].
Более общей теорией гравитации является общая теория относительности Альберта Эйнштейна. В ней гравитация не характеризуется инвариантной силой, не зависящей от системы отсчёта. Вместо этого свободное движение тел в гравитационном поле, воспринимаемое наблюдателем как движение по искривленным траекториям в трехмерном пространстве-времени с переменной скоростью, рассматривается как движение по инерции по геодезической линии в искривлённом четырёхмерном пространстве-времени, в котором время в разных точках течет по-разному. Причем эта линия в некотором смысле «наиболее прямая» — она такова, что пространственно-временной промежуток (собственное время) между двумя пространственно-временными положениями данного тела максимален. Искривление пространства зависит от массы тел, а также от всех видов энергии, присутствующих в системе[3].
Электромагнитное взаимодействие
Основная статья: Электромагнитное взаимодействие Электростатическое поле (поле неподвижных зарядов)Развитие физики после Ньютона добавило к трём основным (длина, масса, время) величинам электрический заряд с размерностью «кулон» (C). Однако, исходя из требований практики, в качестве основной единицы измерения стали использовать не единицу заряда, а единицу силы электрического тока. Так, в системе СИ основной единицей является ампер, а единица заряда — кулон — производная от него.
Поскольку заряд как таковой не существует независимо от несущего его тела, электрическое взаимодействие тел проявляется в виде рассматриваемой в механике силы, служащей причиной ускорения. Применительно к электростатическому взаимодействию двух точечных зарядов с величинами q 1 {\displaystyle q_{1}} и q 2 {\displaystyle q_{2}} , располагающихся в вакууме, используется закон Кулона. В форме, соответствующей системе СИ, он имеет вид:
F → 12 = 1 4 π ε 0 ⋅ q 1 ⋅ q 2 r 12 2 r → 12 r 12 , {\displaystyle {\vec {F}}_{12}={\frac {1}{4\pi \varepsilon _{0}}}\cdot {\frac {q_{1}\cdot q_{2}}{r_{12}^{2}}}{\frac {{\vec {r}}_{12}}{r_{12}}},}где F → 12 {\displaystyle {\vec {F}}_{12}} — сила, с которой заряд 1 действует на заряд 2, r → 12 {\displaystyle {\vec {r}}_{12}} — вектор, направленный от заряда 1 к заряду 2 и по модулю равный расстоянию между зарядами, а ε 0 {\displaystyle \varepsilon _{0}} — электрическая постоянная, равная ≈ 8,854187817•10−12 Ф/м. При помещении зарядов в однородную и изотропную среду сила взаимодействия уменьшается в ε раз, где ε — диэлектрическая проницаемость среды.
Сила направлена вдоль линии, соединяющей точечные заряды. Графически электростатическое поле принято изображать в виде картины силовых линий, представляющих собой воображаемые траектории, по которым перемещалась бы лишённая массы заряженная частица. Эти линии начинаются на одном и заканчиваются на другом заряде.
Магнитостатическое поле (поле постоянных токов) Основная статья: Магнитное полеСуществование магнитного поля признавалось ещё в средние века китайцами, использовавшими «любящий камень» — магнит в качестве прообраза магнитного компаса. Графически магнитное поле принято изображать в виде замкнутых силовых линий, густота которых (так же, как и в случае электростатического поля) определяет его интенсивность. Исторически наглядным способом визуализации магнитного поля были железные опилки, насыпаемые, например, на лист бумаги, положенный на магнит.
Эрстед установил, что текущий по проводнику ток вызывает отклонение магнитной стрелки.
Фарадей пришёл к выводу, что вокруг проводника с током создаётся магнитное поле.
Ампер высказал гипотезу, признанную в физике в качестве модели процесса возникновения магнитного поля, которая предполагает существование в материалах микроскопических замкнутых токов, обеспечивающих совместно эффект естественного или наведённого магнетизма.
Ещё, Ампером было установлено, что в находящейся в вакууме системе отсчёта, по отношению к которой заряд находится в движении, то есть ведёт себя как электрический ток, возникает магнитное поле, интенсивность которого определяется вектором магнитной индукции B → {\displaystyle {\vec {B}}} , лежащим в плоскости, расположенной перпендикулярно по отношению к направлению движения заряда.
Тот же Ампер впервые измерил силу взаимодействия двух параллельных проводников с текущими по ним токами. Один из проводников создавал вокруг себя магнитное поле, второй реагировал на это поле сближением или удалением с поддающейся измерению силой, зная которую и величину силы тока можно было определить модуль вектора магнитной индукции.
Силовое взаимодействие между электрическими зарядами, не находящимися в движении относительно друг друга, описывается законом Кулона. Однако заряды, находящиеся в таком движении, порождают и магнитные поля, посредством которых созданные движением зарядов токи в общем случае приходят в состояние силового взаимодействия.
Принципиальным отличием силы, возникающей при относительном движении зарядов, от случая их стационарного размещения, является различие в геометрии этих сил. Для случая электростатики сила взаимодействия двух зарядов направлена по линии, их соединяющей. Поэтому геометрия задачи двумерна и рассмотрение ведётся в плоскости, проходящей через эту линию.
В случае токов сила, характеризующая магнитное поле, создаваемое током, расположена в плоскости, перпендикулярной току. Поэтому картина явления становится трёхмерной. Магнитное поле, создаваемое бесконечно малым по длине элементом первого тока, взаимодействуя с таким же элементом второго тока, в общем случае создаёт силу, действующую на него. При этом для обоих токов эта картина полностью симметрична в том смысле, что нумерация токов произвольна.
Закон взаимодействия токов используется для эталонирования постоянного электрического тока.
Сильное взаимодействие
Основная статья: Сильное взаимодействиеСильное взаимодействие — фундаментальное короткодействующее взаимодействие между адронами и кварками. В атомном ядре сильное взаимодействие удерживает вместе положительно заряженные (испытывающие электростатическое отталкивание) протоны, происходит это посредством обмена пи-мезонами между нуклонами (протонами и нейтронами). Пи-мезоны живут очень мало, времени жизни им хватает лишь на то, чтобы обеспечить ядерные силы в радиусе ядра, потому ядерные силы называют короткодействующими. Увеличение количества нейтронов «разбавляет» ядро, уменьшая электростатические силы и увеличивая ядерные, но при большом количестве нейтронов они сами, будучи фермионами, начинают испытывать отталкивание вследствие принципа Паули. Также при слишком сильном сближении нуклонов начинается обмен W-бозонами, вызывающий отталкивание, благодаря этому атомные ядра не «схлопываются».
Внутри самих адронов сильное взаимодействие удерживает вместе кварки — составные части адронов. Квантами сильного поля являются глюоны. Каждый кварк имеет один из трёх «цветовых» зарядов, каждый глюон состоит из пары «цвет»-«антицвет». Глюоны связывают кварки в так называемый «конфайнмент», из-за которого на данный момент свободные кварки в эксперименте не наблюдались. При отдалении кварков друг от друга энергия глюонных связей возрастает, а не уменьшается как при ядерном взаимодействии. Затратив много энергии (столкнув адроны в ускорителе), можно разорвать кварк-глюонную связь, но при этом происходит выброс струи новых адронов. Впрочем, свободные кварки могут существовать в космосе: если какому-то кварку удалось избежать конфайнмента во время Большого взрыва, то вероятность аннигилировать с соответствующим антикварком или превратиться в бесцветный адрон для такого кварка исчезающе мала.
Слабое взаимодействие
Основная статья: Слабое взаимодействиеСлабое взаимодействие — фундаментальное короткодействующее взаимодействие. Радиус действия 10−18 м. Симметрично относительно комбинации пространственной инверсии и зарядового сопряжения. В слабом взаимодействии участвуют все фундаментальные фермионы (лептоны и кварки). Это единственное взаимодействие, в котором участвуют нейтрино (не считая гравитации, пренебрежимо малой в лабораторных условиях), чем объясняется колоссальная проникающая способность этих частиц. Слабое взаимодействие позволяет лептонам, кваркам и их античастицам обмениваться энергией, массой, электрическим зарядом и квантовыми числами — то есть превращаться друг в друга. Одно из проявлений — бета-распад.
Производные виды сил
| Этот раздел не завершён. Вы поможете проекту, исправив и дополнив его. |
Сила упругости — сила упругого сопротивления тела внешней нагрузке. Является макроскопической реакцией межмолекулярного электромагнитного взаимодействия материала тела. Снижается при появлении нарушений микроструктуры тела — при появлении остаточной деформации тела. Направлена против внешней силы.
Сила трения — сила сопротивления относительному перемещению контактирующих поверхностей тел. Зависит от шероховатости и электромагнитной природы материалов контактирующих поверхностей. Сила трения чистых «зеркальных» поверхностей является макроскопическим проявлением их межмолекулярного взаимодействия. Вектор силы трения направлен противоположно вектору относительной скорости.
Сила сопротивления среды — сила, возникающая при движении твёрдого тела в жидкой или газообразной среде. Относится к диссипативным силам. Сила сопротивления имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Вектор силы сопротивления направлен противоположно вектору скорости.
Сила нормальной реакции опоры — упругая сила, действующая со стороны поверхности опоры в направлении, перпендикулярном поверхности в данном месте.
Силы поверхностного натяжения — силы, возникающие на поверхности фазового раздела. Имеют электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Сила натяжения направлена по касательной к границе раздела фаз; возникает вследствие нескомпенсированного притяжения молекул, находящихся на границе, молекулами, находящимися не на границе.
Силы Ван-дер-Ваальса — электромагнитные межмолекулярные силы, возникающие при поляризации молекул и образовании диполей. Вандерваальсовы силы быстро убывают с увеличением расстояния.
Вес тела — сила воздействия тела на опору (или подвес, или другой вид крепления), препятствующую падению, возникающая в поле сил тяжести. По традиции большинства учебников физики на английском языке вес тела тождественен гравитационной силе, а силу воздействия тела на опору или подвес называют кажущимся весом[источник не указан 208 дней].
Трение покоя, трение сцепления — сила, возникающая между двумя контактирующими телами и препятствующая возникновению относительного движения.
Сила натяжения струны (троса, верёвки, каната) — сила, действующая на физическое тело со стороны струны, направленная по направлению струны от точки закрепления струны к физическому телу, и по величине равная натяжению струны[прояснить].
Сила инерции
Основная статья: Сила инерцииСила инерции — сила, вводимая в неинерциальных системах отсчёта. Введение сил инерции производится для того, чтобы придать уравнениям движения тел в неинерциальных системах отсчёта ту же форму, какую имеет уравнение второго закона Ньютона в инерциальных системах. В ряде случаев такой подход позволяет сделать рассмотрение движения более удобным и наглядным, а решение соответствующих задач — более простым.
В частности, в системе отсчёта, связанной с равноускоренно движущимся телом, сила инерции направлена противоположно ускорению. Из полной силы инерции, представляющей собой сумму переносной и кориолисовой, могут быть для удобства выделены центробежная сила и сила Кориолиса.
Силы инерции принципиально отличаются от всех остальных сил тем, что никакому реальному взаимодействию тел они не соответствуют. При этом, ввиду равенства инерционной и гравитационной масс, согласно Принципу эквивалентности сил гравитации и инерции локально невозможно отличить, какая сила действует на данное тело — гравитационная или же сила инерции[источник не указан 1521 день].
Применение термина «сила инерции» в элементарной физике не рекомендуется, так как, по умолчанию, все уравнения движения в элементарной физике описывают движение относительно инерциальных систем отчета и понятие «сила» всегда связано с воздействием какого-то внешнего объекта и не может существовать само по себе. Указание на диаграмме сил, действующих на тело, силы инерции оценивается в курсах элементарной физики как ошибка.
ru.wikipedia.org
Сила это:
Сила Запрос «сила» перенаправляется сюда; см. также другие значения. Размерность Единицы измерения СИ СГС Примечания| Сила | |
|
LMT−2 |
|
|
ньютон |
|
|
дина |
|
|
векторная величина |
|
| |
||||||||
Второй закон Ньютона |
||||||||
| История… | ||||||||
Фундаментальные понятия
|
||||||||
| См. также: Портал:Физика |
 Объединяет все силы то, что они вызывают ускоренное движение массивных тел и возникновение в этих телах деформаций.
Объединяет все силы то, что они вызывают ускоренное движение массивных тел и возникновение в этих телах деформаций.
Си́ла — векторная физическая величина, являющаяся мерой интенсивности воздействия на данное тело других тел, а также полей. Приложенная к массивному телу сила является причиной изменения его скорости или возникновения в нём деформаций.[1]
Сила как векторная величина характеризуется модулем, направлением и «точкой» приложения силы. Последним параметром понятие о силе, как векторе в физике, отличается от понятия о векторе в векторной алгебре, где равные по модулю и направлению векторы, независимо от точки их приложения, считаются одним и тем же вектором . В физике эти векторы называются свободными векторами. В механике чрезвычайно распространено представление о связанных векторах, начало которых закреплено в определённой точке пространства или же может находиться на линии, продолжающей направление вектора (скользящие векторы).[2].
Также используется понятие линия действия силы, обозначающее проходящую через точку приложения силы прямую, по которой направлена сила.
Второй закон Ньютона гласит, что в инерциальных системах отсчета ускорение материальной точки по направлению совпадает с приложенной силой, а по модулю прямо пропорционально модулю силы и обратно пропорционально массе материальной точки. Или, что эквивалентно, в инерциальных системах отсчета скорость изменения импульса материальной точки равна приложенной силе.
При приложении силы к телу конечных размеров в нём возникают механические напряжения, сопровождающиеся деформациями.[3][4][5][6]
С точки зрения Стандартной модели физики элементарных частиц фундаментальные взаимодействия (гравитационное, слабое, электромагнитное, сильное) осуществляются посредством обмена так называемыми калибровочными бозонами.[3] Эксперименты по физике высоких энергий, проведённые в 70−80-х гг. XX в. подтвердили предположение о том, что слабое и электромагнитное взаимодействия являются проявлениями более фундаментального электрослабого взаимодействия.[7]
Размерность силы — LMT−2, единицей измерения в Международной системе единиц (СИ) является ньютон (N, Н), в системе СГС — дина.
Содержание
|
История понятия
Понятие силы использовали ещё ученые античности в своих работах о статике и движении. Изучением сил в процессе конструирования простых механизмов занимался в III в. до н. э. Архимед.[8] Представления Аристотеля о силе, связанные с фундаментальными несоответствиями, просуществовали в течение нескольких столетий. Эти несоответствия устранил в XVII в. Исаак Ньютон, используя для описания силы математические методы. Механика Ньютона оставалась общепринятой на протяжении почти трехсот лет.[5] К началу XX в. Альберт Эйнштейн в теории относительности показал, что ньютоновская механика верна лишь в при сравнительно небольших скоростях движения и массах тел в системе, уточнив тем самым основные положения кинематики и динамики и описав некоторые новые свойства пространства-времени.
Ньютоновская механика
Основная статья: Законы НьютонаИсаак Ньютон задался целью описать движение объектов, используя понятия инерции и силы. Сделав это, он попутно установил, что всякое механическое движение подчиняется общим законам сохранения. В 1687 г. Ньютон опубликовал свой знаменитый труд «Математические начала натуральной философии», в котором изложил три основополагающих закона классической механики (знаменитые законы Ньютона).[5][9]
Первый закон Ньютона
Основная статья: Первый закон НьютонаПервый закон Ньютона утверждает, что существуют системы отсчета, в которых тела сохраняют состояние покоя или равномерного прямолинейного движения при отсутствии действий на них со стороны других тел или при взаимной компенсации этих воздействий.[9] Такие системы отсчета называются инерциальными. Ньютон предположил, что каждый массивный объект имеет определенный запас инерции, который характеризует «естественное состояние» движения этого объекта. Эта идея отрицает взгляд Аристотеля, который рассматривал покой «естественным состоянием» объекта. Первый закон Ньютона противоречит аристотелевской физике, одним из положений которой является утверждение о том, что тело может двигаться с постоянной скоростью лишь под действием силы. Тот факт, что в механике Ньютона в инерциальных системах отсчёта покой физически неотличим от равномерного прямолинейного движения, является обоснованием принципа относительности Галилея. Среди совокупности тел принципиально невозможно определить какие из них находится «в движении», а какие «покоятся». Говорить о движении можно лишь относительно какой-либо системы отсчета. Законы механики выполняются одинаково во всех инерциальных системах отсчета, другими словами все они механически эквивалентны. Последнее следует из так называемых преобразований Галилея.[10]
Прямолинейное равномерно ускоряющееся движение в одной инерциальной системе в общем случае будет параболическим в другой равномерно двигающейся инерциальной системе отсчёта.Например, законы механики абсолютно одинаково выполняются в кузове грузовика, когда тот едет по прямому участку дороги с постоянной скоростью и когда стоит на месте. Человек может подбросить мячик вертикально вверх и поймать его через некоторое время на том же самом месте вне зависимости от того движется ли грузовик равномерно и прямолинейно или покоится. Для него мячик летит по прямой. Однако для стороннего наблюдателя, находящегося на земле, траектория движения мячика имеет вид параболы. Это связано с тем, что мячик относительно земли движется во время полета не только вертикально, но и горизонтально по инерции в сторону движения грузовика. Для человека, находящегося в кузове грузовика не имеет значения движется ли последний по дороге, или окружающий мир перемещается с постоянной скоростью в противоположном направлении, а грузовик стоит на месте. Таким образом, состояние покоя и равномерного прямолинейного движения физически неотличимы друг от друга.
Второй закон Ньютона
Основная статья: Второй закон Ньютона Хотя второй закон Ньютона традиционно записывают в виде: , сам Ньютон записывал его несколько иначе[как?]
Хотя второй закон Ньютона традиционно записывают в виде: , сам Ньютон записывал его несколько иначе[как?]
Второй закон Ньютона в современной формулировке звучит так: в инерциальной системе отсчета скорость изменения импульса материальной точки равна векторной сумме всех сил, действующих на эту точку.
где − импульс материальной точки, − суммарная сила, действующая на материальную точку. Второй закон Ньютона гласит, что действие несбалансированных сил приводит к изменению импульса материальной точки[9].
По определению импульса:
где − масса, − скорость.
В классической механике при скоростях движения много меньше скорости света масса материальной точки считается неизменной, что позволяет выносить её при этих условиях за знак дифференциала :
Учитывая определение ускорения точки, второй закон Ньютона принимает вид:
Считается, что это «вторая самая известная формула в физике», хотя сам Ньютон никогда явным образом не записывал свой второй закон в этом виде. Впервые данную форму закона можно встретить в трудах К.Маклорена и Л.Эйлера.
Поскольку в любой инерциальной системе отсчёта ускорение тела одинаково и не меняется при переходе от одной системы к другой, то и сила инвариантна по отношению к такому переходу.
Во всех явлениях природы сила, независимо от своего происхождения, проявляется только в механическом смысле, то есть как причина нарушения равномерного и прямолинейного движения тела в инерциальной системе координат. Обратное утверждение, т.е установление факта такого движения, не свидетельствует об отсутствии действующих на тело сил, а лишь о том, что действия этих сил взаимно уравновешиваются. Иначе: их векторная сумма есть вектор с модулем, равным нулю. На этом основано измерение величины силы, когда она компенсируется силой, величина которой известна .
Второй закон Ньютона позволяет измерять величину силы. Например, знание массы планеты и ее центростремительного ускорения при движении по орбите позволяет вычислить величину силы гравитационного притяжения, действующую на эту планету со стороны Солнца.
Третий закон Ньютона
Основная статья: Третий закон НьютонаДля любых двух тел (назовем их тело 1 и тело 2) третий закон Ньютона утверждает, что сила действия тела 1 на тело 2, сопровождается появлением равной по модулю, но противоположной по направлению силы, действующей на тело 1 со стороны тела 2.[11] Математически закон записывается так:
Этот закон означает, что силы всегда возникают парами «действие-противодействие».[9] Если тело 1 и тело 2 находятся в одной системе, то суммарная сила в системе, обусловленная взаимодействием этих тел равна нулю:
Это означает, что в замкнутой системе не существует несбалансированных внутренних сил. Это приводит к тому, что центр масс замкнутой системы (то есть той, на которую не действуют внешние силы) не может двигаться с ускорением. Отдельные части системы могут ускоряться, но лишь таким образом, что система в целом остается в состоянии покоя или равномерного прямолинейного движения. Однако в том случае, если внешние силы подействуют на систему, то ее центр масс начнет двигаться с ускорением, пропорциональным внешней результирующей силе и обратно пропорциональным массе системы.[3]
Фундаментальные взаимодействия
Основная статья: Фундаментальные взаимодействияВсе силы в природе основаны на четырех типах фундаментальных взаимодействий. Максимальная скорость распространения всех видов взаимодействия равна скорости света в вакууме. Электромагнитные силы действуют между электрически заряженными телами, гравитационные − между массивными объектами. Сильное и слабое проявляются только на очень малых расстояниях, они ответственны за возникновение взаимодействия между субатомными частицами, включая нуклоны, из которых состоят атомные ядра.
Интенсивность сильного и слабого взаимодействия измеряется в единицах энергии (электрон-вольтах), а не единицах силы, и потому применение к ним термина «сила» объясняется берущей из античности традицией объяснять любые явления в окружаемом мире действием специфических для каждого явления «сил».
Понятие силы не может быть применено по отношению к явлениям субатомного мира. Это понятие из арсенала классической физики, ассоциирующейся (пусть даже только подсознательно) с ньютоновскими представлениями о силах, действующих на расстоянии. В субатомной физике таких сил уже нет: их заменяют взаимодействия между частицами, происходящими через посредство полей, то есть каких-то других частиц. Поэтому физики высоких энергий избегают употреблять слово сила, заменяя его словом взаимодействие.[12]
Каждый вид взаимодействия обусловлен обменом соответствующих переносчиков взаимодействия: гравитационное − обменом гравитонов (существование не подтверждено экспериментально), электромагнитное − виртуальных фотонов, слабое − векторных бозонов, сильное − глюонов (и на больших расстояниях — мезонов). В настоящее время электромагнитное и слабое взаимодействия объединены в более фундаментальное электрослабое взаимодействие. Делаются попытки объединения всех четырех фундаментальных взаимодействие в одно (так называемая теория великого объединения).
Всё многообразие проявляющих себя в природе сил в принципе может быть сведено к этим четырем фундаментальным взаимодействиям. Например, трение − это проявление электромагнитных сил, действующих между атомами двух соприкасающихся поверхностей, и принципа запрета Паули,[13] который не позволяет атомам проникать в область друг друга. Сила, возникающая при деформации пружины, описываемая законом Гука, также является результатом действия электромагнитных сил между частицами и принципа запрета Паули, заставляющих атомы кристаллической решетки вещества удерживаться около положения равновесия.[3].
Однако на практике оказывается не только нецелесообразной, но и просто невозможной по условиям задачи подобная детализация рассмотрения вопроса о действии сил.
Гравитация
Основная статья: ГравитацияГравитация (сила тяготения) — универсальное взаимодействие между любыми видами материи. В рамках классической механики описывается законом всемирного тяготения, сформулированным Исааком Ньютоном в его труде «Математические начала натуральной философии». Ньютон получил величину ускорения, с которым Луна движется вокруг Земли, положив при расчете, что сила тяготения убывает обратно пропорционально квадрату расстояния от тяготеющего тела. Кроме этого, им же было установлено, что ускорение, обусловленное притяжением одного тела другим, пропорционально произведению масс этих тел[14]. На основании этих двух выводов был сформулирован закон тяготения: любые материальные частицы притягиваются по направлению друг к другу с силой , прямо пропорциональной произведению масс ( и ) и обратно пропорциональной квадрату расстояния между ними:
Здесь − гравитационная постоянная[15], значение которой впервые получил в своих опытах Генри Кавендиш. Используя данный закон, можно получить формулы для расчета силы тяготения тел произвольной формы. Теория тяготения Ньютона хорошо описывает движение планет Солнечной системы и многих других небесных тел. Однако, в ее основе лежит концепция дальнодействия, противоречащая теории относительности. Поэтому классическая теория тяготения неприменима для описания движения тел, перемещающихся со скоростью, близкой к скорости света, гравитационных полей чрезвычайно массивных объектов (например, черных дыр), а также переменных полей тяготения, создаваемых движущимися телами, на больших расстояниях от них[16].
Более общей теорией гравитации является общая теория относительности Альберта Эйнштейна. В ней гравитация не характеризуется инвариантной силой, не зависящей от системы отсчёта. Вместо этого свободное движение тел в гравитационном поле, воспринимаемое наблюдателем как движение по искривленным траекториям в трехмерном пространстве-времени с переменной скоростью, рассматривается как движение по инерции по геодезической линии в искривлённом четырехмерном пространстве-времени, в котором время в разных точках течет по-разному. Причем эта линия в некотором смысле «наиболее прямая» — она такова, что пространственно-временной промежуток (собственное время) между двумя пространственно-временными положениями данного тела максимален. Искривление пространства зависит от массы тел, а также от всех видов энергии, присутствующих в системе[3].
Электромагнитное взаимодействие
Основная статья: Электромагнитное взаимодействиеЭлектростатическое поле (поле неподвижных зарядов)
Развитие физики после Ньютона добавило к трём основным (длина, масса, время) величинам электрический заряд с размерностью C. Однако, исходя из требований практики, в качестве основной единицы измерения стали использовать не единицу заряда, а единицу силы электрического тока. Так, в системе СИ основной единицей является ампер, а единица заряда — кулон — производная от него.
Поскольку заряд, как таковой, не существует независимо от несущего его тела, то электрическое взаимодействие тел проявляется в виде той же рассматриваемой в механике силы, служащей причиной ускорения. Применительно к электростатическому взаимодействию двух точечных зарядов величинами и , располагающихся в вакууме, используется закон Кулона. В форме, соответствующей системе СИ, он имеет вид:
где — сила, с которой заряд 1 действует на заряд 2, — вектор, направленный от заряда 1 к заряду 2 и по модулю равный расстоянию между зарядами, а — электрическая постоянная, равная ≈ 8,854187817•10−12 Ф/м. При помещении зарядов в однородную и изотропную среду сила взаимодействия уменьшается в ε раз, где ε — относительная диэлектрическая проницаемость среды.
Сила направлена вдоль линии, соединяющей точечные заряды. Графически электростатическое поле принято изображать в виде картины силовых линий, представляющих собой воображаемые траектории, по которым бы перемещалась лишённая массы заряженная частица. Эти линии начинаются на одном и заканчиваются на другом заряде.
Электромагнитное поле (поле постоянных токов)
Основная статья: Магнитное полеСуществование магнитного поля признавалось ещё в средние века китайцами, использовавшим «любящий камень» — магнит, в качестве прообраза магнитного компаса. Графически магнитное поле принято изображать в виде замкнутых силовых линий, густота которых (так же, как и в случае электростатического поля) определяет его интенсивность. Исторически наглядным способом визуализации магнитного поля были железные опилки, насыпаемые, например, на лист бумаги, положенный на магнит.
Эрстед установил, что текущий по проводнику ток вызывает отклонение магнитной стрелки.
Фарадей пришёл к выводу, что вокруг проводника с током создаётся магнитное поле.
Ампер высказал гипотезу, признаваемую в физике, как модель процесса возникновения магнитного поля, заключающуюся в существовании в материалах микроскопических замкнутых токов, обеспечивающих совместно эффект естественного или наведённого магнетизма.
Ампером было установлено, что в находящейся в вакууме системе отсчёта, по отношению к которой заряд находится в движении, то есть ведёт себя как электрический ток, возникает магнитное поле, интенсивность которого определяется вектором магнитной индукции, лежащим в плоскости, расположенной перпендикулярно по отношению к направлению движения заряда.
Единицей измерения магнитной индукции является тесла: 1 Тл = 1 Т кг с−2 А−2
Количественно задача была решена Ампером, измерявшим силу взаимодействия двух параллельных проводников с текущими по ним токами. Один из проводников создавал вокруг себя магнитное поле, второй реагировал на это поле сближением или удалением с поддающейся измерению силой, зная которую и величину силы тока можно было определить модуль вектора магнитной индукции.
Силовое взаимодействие между электрическими зарядами, не находящимися в движении относительно друг друга описывается законом Кулона. Однако заряды, находящиеся в движении относительно друг друга создают магнитные поля, посредством которых созданные движением зарядов токов в общем случае приходят в состояние силового взаимодействия.
Принципиальным отличием силы, возникающей при относительном движении зарядов от случая их стационарного размещения, является различие в геометрии этих сил. Для случая электростатики сил взаимодействия двух зарядов направлена по линии, их соединяющей. Поэтому геометрия задачи двумерна и рассмотрение ведётся в плоскости, проходящей через эту линию.
В случае токов сила, характеризующая магнитное поле, создаваемое током, расположена в плоскости, перпендикулярной току. Поэтому картина явления становится трёхмерной. Магнитное поле, создаваемое бесконечно малым по длине элементом первого тока, взаимодействуя с таким же элементом второго тока, в общем случае создаёт силу, действующую на него. При этом для обоих токов эта картина полностью симметрична в том смысле, что нумерация токов произвольна.
Закон взаимодействия токов используется для эталонирования постоянного электрического тока.
Сильное взаимодействие
Основная статья: Сильное взаимодействиеСильное взаимодействие — короткодействующие силы между адронами и кварками. В атомном ядре сильное взаимодействие удерживает вместе положительно заряженные (испытывающие электростатическое отталкивание) протоны, происходит это посредством обмена пи-мезонами между нуклонами (протонами и нейтронами). Пи-мезоны живут очень мало, времени жизни им хватает лишь на то, чтобы обеспечить ядерные силы в радиусе ядра, потому ядерные силы называют короткодействующими. Увеличение количества нейтронов «разбавляет» ядро, уменьшая электростатические силы и увеличивая ядерные, но при большом количестве нейтронов они сами, будучи фермионами, начинают испытывать отталкивание вследствие принципа Паули. Также при слишком сильном сближении нуклонов начинается обмен W-бозонами, вызывающее отталкивание, благодаря этому атомные ядра не «схлопываются».
Внутри самих адронов сильное взаимодействие удерживает вместе кварки — составные части адронов. Квантами сильного поля являются глюоны. Каждый кварк имеет один из трёх «цветовых» зарядов, каждый глюон состоит из пары «цвет»-«антицвет». Глюоны связывают кварки в т. н. «конфайнмент», из-за которого на данный момент свободные кварки в эксперименте не наблюдались. При отдалении кварков друг от друга энергия глюонных связей возрастает, а не уменьшается как при ядерном взаимодействии. Затратив много энергии (столкнув адроны в ускорителе) можно разорвать кварк-глюонную связь, но при этом происходит выброс струи новых адронов. Впрочем, свободные кварки могут существовать в космосе: если какому-то кварку удалось избежать конфайнмента во время Большого взрыва, то вероятность аннигилировать с соответствующим антикварком или превратиться в бесцветный адрон для такого кварка исчезающе мала.
Слабое взаимодействие
Основная статья: Слабое взаимодействиеСлабое взаимодействие — фундаментальное короткодействующее взаимодействие. Радиус действия 10−18 м. Симметрично относительно комбинации пространственной инверсии и зарядового сопряжения. В слабом взаимодействии участвуют все фундаментальные фермионы (лептоны и кварки). Это единственное взаимодействие, в котором участвуют нейтрино (не считая гравитации, пренебрежимо малой в лабораторных условиях), чем объясняется колоссальная проникающая способность этих частиц. Слабое взаимодействие позволяет лептонам, кваркам и их античастицам обмениваться энергией, массой, электрическим зарядом и квантовыми числами — то есть превращаться друг в друга. Одно из проявлений — бета-распад.
Производные виды сил
| Этот раздел не завершён. Вы поможете проекту, исправив и дополнив его. |
Данные виды сил носят феноменологический характер и определяются с помощью теории определяющих соотношений.
Сила упругости — сила упругого сопротивления тела внешней нагрузке. Является макроскопической реакцией межмолекулярного электромагнитного взаимодействия материала тела. Снижается при появлении нарушений микроструктуры тела — при появлении остаточной деформации тела. Направлена против внешней силы.
Сила трения — сила сопротивления относительному перемещению контактирующих поверхностей тел. Зависит от шероховатости и электромагнитной природы материалов контактирующих поверхностей. Сила трения чистых «зеркальных» поверхностей является макроскопическим проявлением их межмолекулярного взаимодействия. Вектор силы трения направлен противоположно вектору относительной скорости.
Сила сопротивления среды — сила, возникающая при движении твёрдого тела в жидкой или газообразной среде. Относится к диссипативным силам. Сила сопротивления имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Вектор силы сопротивления направлен противоположно вектору скорости.
Сила нормальной реакции опоры — упругая сила, действующая со стороны опоры и противодействующая внешней нагрузке.
Силы поверхностного натяжения — силы, возникающие на поверхности фазового раздела. Имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Сила натяжения направлена по касательной к поверхности раздела фаз; возникает вследствие нескомпенсированного притяжения молекул, находящихся на границе раздела фаз, молекулами, находящимися не на границе раздела фаз.
Осмотическое давление
Силы Ван-дер-Ваальса — электромагнитные межмолекулярные силы, возникающие при поляризации молекул и образовании диполей. Ван-дер-Ваальсовы силы быстро убывают с увеличением расстояния.
Сила инерции
Сила инерции — фиктивная сила, вводимая в неинерциальных системах отсчёта. Введение сил инерции производится для того, чтобы придать уравнениям движения тел в неинерциальных системах отсчёта ту же форму, какую имеет уравнение второго закона Ньютона в инерциальных системах. В ряде случаев такой подход позволяет сделать рассмотрение движения более удобным и наглядным, а решение соответствующих задач — более простым.
В частности, в системе отсчёта, связанной с равноускоренно движущимся телом, сила инерции направлена противоположно ускорению. Из полной силы инерции, представляющей собой сумму переносной и кориолисовой, могут быть для удобства выделены центробежная сила и сила Кориолиса.
Силы инерции принципиально отличаются от всех остальных сил тем, что никакому реальному взаимодействию тел они не соответствуют.
Равнодействующая сила
При расчёте ускорения тела все действующие на него силы заменяют одной силой, называемой равнодействующей. Это геометрическая сумма всех сил, действующих на тело. При этом действие каждой силы не зависит от действия других, то есть каждая сила сообщает телу такое ускорение, какое она сообщила бы в отсутствие действия других сил. Это утверждение носит название принципа независимости действия сил (принцип суперпозиции).
См. также
- Энергия
- Поле (физика)
- Вес
- Нерешённые проблемы современной физики
Источники
- Григорьев В. И., Мякишев Г. Я. — «Силы в природе»
- Ландау, Л. Д., Лифшиц, Е. М. Механика. — Издание 5-е, стереотипное. — М.: Физматлит, 2004. — 224 с. — («Теоретическая физика», том I). — ISBN 5-9221-0055-6
Примечания
- ↑ Glossary. Earth Observatory. NASA. — «Сила — любой внешний фактор, который вызывает изменение в движении свободного тела или возникновение внутренних напряжений в зафиксированном теле.» (англ.)
- ↑ Бронштейн И. Н. Семендяев К. А. Справочник по математике. М.: Издательство «Наука» Редакция справочной физико-математической литературы.1964.
- ↑ 1 2 3 4 5 Feynman, R. P., Leighton, R. B., Sands, M. Lectures on Physics, Vol 1. — Addison-Wesley, 1963. (англ.)
- ↑ Kleppner, D., Kolenkow, R. J. An introduction to mechanics. — McGraw-Hill. (англ.)
- ↑ 1 2 3 University Physics, Sears, Young & Zemansky, pp. 18-38 (англ.)
- ↑ Хайкин С. Э.Силы инерции и невесомость. Изд-во «Наука» М.,1967, с илл.
- ↑ Weinberg, S. Dreams of a Final Theory. — Vintage Books USA, 1994. — ISBN 0-679-74408-8 (англ.)
- ↑ Heath,T.L. The Works of Archimedes (1897). Archive.org. Архивировано из первоисточника 23 августа 2011. Проверено 14 октября 2007. (англ.)
- ↑ 1 2 3 4 Newton, I. The Principia Mathematical Principles of Natural Philosophy. — University of California Press, 1999. — ISBN 0-520-08817-4 (англ.)
- ↑ Мултановский В. В. Курс теоретической физики. Классическая механика. Основы специальной теории относительности. Релятивистская механика. — М.: Просвещение, 1988. — С. 80−81.
- ↑ Henderson, Tom Lesson 4: Newton's Third Law of Motion. The Physics Classroom (1996-2007). Архивировано из первоисточника 23 августа 2011. Проверено 4 января 2008. (англ.)
- ↑ Капра, Фритьоф ДАО ФИЗИКИ. СПб.,"ОРИС"*"ЯНА-ПРИНТ". 1994 г. 304 с. ISBN 5-88436-021-5
- ↑ Nave, R Pauli Exclusion Principle. HyperPhysics***** Quantum Physics. Архивировано из первоисточника 23 августа 2011. Проверено 2 января 2008. (англ.)
- ↑ University Physics, Sears, Young & Zemansky, pp. 59−82 (англ.)
- ↑ Sir Isaac Newton: The Universal Law of Gravitation. Astronomy 161 The Solar System. Архивировано из первоисточника 23 августа 2011. Проверено 4 января 2008. (англ.)
- ↑ «Тяготение». Новиков И. Д. // Физическая энциклопедия. Гл. ред. Прохоров А. М. — М.: «Большая Российская энциклопедия», 1998. — Т. 5. — С. 188−193. — 760 с. — ISBN 5-85270-101-7
- Физические величины по алфавиту
- Сила
Wikimedia Foundation. 2010.
dic.academic.ru
Механическая работа
Размерность Единицы измерения СИ СГС Примечания| Работа | |
| A = F ⋅ S {\displaystyle A={\mathbf {F}}\cdot {\mathbf {S}}} | |
|
L2MT−2 |
|
|
Дж |
|
|
эрг |
|
|
скалярная величина |
|
| W = F ⋅ S = F ⋅ S ⋅ cos φ {\displaystyle W={\mathbf {F}}\cdot {\mathbf {S}}=F\cdot S\cdot \cos \varphi } | ||||||
| Работа силы | ||||||
| Ключевые статьи | ||||||
Работа в физике
|
||||||
| См. также: Портал:Физика |
Мeханическая работа — это физическая величина — скалярная количественная мера действия силы (равнодействующей сил) на тело или сил на систему тел. Зависит от численной величины и направления силы (сил), и от перемещения тела (системы тел)[1].
Используемые обозначения
Работа обычно обозначается буквой A (от нем. Arbeit — работа, труд) или буквой W (от англ. work — работа, труд).
Определение
Работа силы, приложенной к материальной точке
Суммарная работа по перемещению одной материальной точки, совершаемая несколькими силами, приложенными к этой точке, определяется как работа равнодействующей этих сил (их векторной суммой). Поэтому дальше будем говорить об одной силе, приложенной к материальной точке.
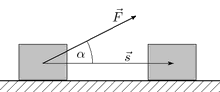
При прямолинейном движении материальной точки и постоянном значении приложенной к ней силы работа (этой силы) равна произведению проекции вектора силы на направление движения и длины вектора перемещения, совершённого точкой:
A = F s s = F s c o s ( F , s ) = F → ⋅ s → {\displaystyle A=F_{s}s=Fs\ \mathrm {cos} (F,s)={\vec {F}}\cdot {\vec {s}}}Здесь точкой обозначено скалярное произведение, s → {\displaystyle {\vec {s}}} — вектор перемещения; подразумевается, что действующая сила F → {\displaystyle {\vec {F}}} постоянна в течение времени, за которое вычисляется работа.
В общем случае, когда сила не постоянна, а движение не прямолинейно, работа вычисляется как криволинейный интеграл второго рода по траектории точки[2]:
A = ∫ F → ⋅ d s → . {\displaystyle A=\int {\vec {F}}\cdot {\vec {ds}}.}(подразумевается суммирование по кривой, которая является пределом ломаной, составленной из последовательных перемещений d s → , {\displaystyle {\vec {ds}},} если вначале считать их конечными, а потом устремить длину каждого к нулю).
Если существует зависимость силы от координат[3], интеграл определяется[4] следующим образом:
A = ∫ r → 0 r → 1 F → ( r → ) ⋅ d r → {\displaystyle A=\int \limits _{{\vec {r}}_{0}}^{{\vec {r}}_{1}}{\vec {F}}\left({\vec {r}}\right)\cdot {\vec {dr}}} ,где r → 0 {\displaystyle {\vec {r}}_{0}} и r → 1 {\displaystyle {\vec {r}}_{1}} — радиус-векторы начального и конечного положения тела соответственно.
- Следствие. Если направление приложенной силы ортогонально перемещению тела, или перемещение равно нулю, то работа (этой силы) равна нулю.
Работа сил, приложенных к системе материальных точек
Работа сил по перемещению системы материальных точек определяется как сумма работ этих сил по перемещению каждой точки (работы, совершённые над каждой точкой системы, суммируются в работу этих сил над системой).
Даже если тело не является системой дискретных точек, его можно разбить (мысленно) на множество бесконечно малых элементов (кусочков), каждый из которых можно считать материальной точкой и вычислить работу в соответствии с определением выше. В этом случае дискретная сумма заменяется на интеграл.
- Эти определения могут быть использованы как для вычисления работы конкретной силы или класса сил, так и для вычисления полной работы, совершаемой всеми силами, действующими на систему.
Кинетическая энергия
Кинетическая энергия вводится в механике в прямой связи с понятием работы.
Схема рассуждений такова: 1) попробуем записать работу, совершаемую всеми силами, действующими на материальную точку и, пользуясь вторым законом Ньютона (позволяющим выразить силу через ускорение), попытаться выразить ответ только через кинематические величины, 2) убедившись, что это удалось, и что этот ответ зависит только от начального и конечного состояния движения, введём новую физическую величину, через которую эта работа будет просто выражаться (это и будет кинетическая энергия).
Если A t o t a l {\displaystyle A_{total}} — полная работа, совершённая над частицей, определяемая как сумма работ, совершенных приложенными к частице силами, то она выражается как:
A t o t a l = Δ ( m v 2 2 ) = Δ E k , {\displaystyle A_{total}=\Delta \left({\frac {mv^{2}}{2}}\right)=\Delta E_{k},}где E k {\displaystyle E_{k}} называется кинетической энергией. Для материальной точки кинетическая энергия определяется как половина произведения массы этой точки на квадрат её скорости и выражается как[5]:
E k = 1 2 m v 2 . {\displaystyle E_{k}={\frac {1}{2}}mv^{2}.}Для сложных объектов, состоящих из множества частиц, кинетическая энергия тела равна сумме кинетических энергий частиц.
Потенциальная энергия
Сила называется потенциальной, если существует скалярная функция координат, известная как потенциальная энергия и обозначаемая E p {\displaystyle E_{p}} , такая что
F → = − ∇ E p . {\displaystyle {\vec {F}}=-\nabla E_{p}.}Если все силы, действующие на частицу консервативны, и E p {\displaystyle E_{p}} является полной потенциальной энергией, полученной суммированием потенциальных энергий соответствующих каждой силе, тогда:
| F → ⋅ Δ s → = − ∇ → E p ⋅ Δ s → = − Δ E p ⇒ − Δ E p = Δ E k ⇒ Δ ( E k + E p ) = 0 {\displaystyle {\vec {F}}\cdot \Delta {\vec {s}}=-{\vec {\nabla }}E_{p}\cdot \Delta {\vec {s}}=-\Delta E_{p}\Rightarrow -\Delta E_{p}=\Delta E_{k}\Rightarrow \Delta (E_{k}+E_{p})=0} . |
Этот результат известен как закон сохранения механической энергии и утверждает, что полная механическая энергия в замкнутой системе, в которой действуют консервативные силы,
∑ E = E k + E p {\displaystyle \sum E=E_{k}+E_{p}}является постоянной во времени. Этот закон широко используется при решении задач классической механики.
Работа в термодинамике
Основная статья: Термодинамическая работаВ термодинамике работа, совершенная газом при расширении[6], рассчитывается как интеграл давления по объёму:
A 1 → 2 = ∫ V 1 V 2 P d V . {\displaystyle A_{1\rightarrow 2}=\int \limits _{V_{1}}^{V_{2}}PdV.}
Работа, совершенная над газом, совпадает с этим выражением по абсолютной величине, но противоположна по знаку.
- Естественное обобщение этой формулы применимо не только к процессам, где давление есть однозначная функция объема, но и к любому процессу (изображаемому любой кривой в плоскости PV), в частности, к циклическим процессам.
- В принципе, формула применима не только к газу, но и к чему угодно, способному оказывать давление (надо только чтобы давление в сосуде было всюду одинаковым, что неявно подразумевается в формуле).
Эта формула прямо связана с механической работой. Действительно, попробуем написать механическую работу при расширении сосуда, учитывая, что сила давления газа будет направлена перпендикулярно каждой элементарной площадке, равна произведению давления P на площадь dS площадки, и тогда работа, совершаемая газом для смещения h одной такой элементарной площадки будет
d A = P d S h . {\displaystyle dA=PdSh.}Видно, что это и есть произведение давления на приращение объема вблизи данной элементарной площадкой. А просуммировав по всем dS получим конечный результат, где будет уже полное приращение объема, как и в главной формуле параграфа.
Работа силы в теоретической механике
Рассмотрим несколько детальнее, чем это было сделано выше, построение определения энергии как риманова интеграла.
Пусть материальная точка M {\displaystyle M} движется по непрерывно дифференцируемой кривой G = { r = r ( s ) } {\displaystyle G=\{r=r(s)\}} , где s — переменная длина дуги, 0 ≤ s ≤ S {\displaystyle 0\leq s\leq S} и на неё действует сила F ( s ) {\displaystyle F(s)} , направленная по касательной к траектории в направлении движения (если сила не направлена по касательной, то будем понимать под F ( s ) {\displaystyle F(s)} проекцию силы на положительную касательную кривой, таким образом сведя и этот случай к рассматриваемому далее). Величина F ( ξ i ) △ s i , △ s i = s i − s i − 1 , i = 1 , 2 , . . . , i τ {\displaystyle F(\xi _{i})\triangle s_{i},\triangle s_{i}=s_{i}-s_{i-1},i=1,2,...,i_{\tau }} , называется элементарной работой силы F {\displaystyle F} на участке G i {\displaystyle G_{i}} и принимается за приближенное значение работы, которую производит сила F {\displaystyle F} , воздействующая на материальную точку, когда последняя проходит кривую G i {\displaystyle G_{i}} . Сумма всех элементарных работ ∑ i = 1 i τ F ( ξ i ) △ s i {\displaystyle \sum _{i=1}^{i_{\tau }}F(\xi _{i})\triangle s_{i}} является интегральной суммой Римана функции F ( s ) {\displaystyle F(s)} .
В соответствии с определением интеграла Римана, можем дать определение работе:
Предел, к которому стремится сумма ∑ i = 1 i τ F ( ξ i ) △ s i {\displaystyle \sum _{i=1}^{i_{\tau }}F(\xi _{i})\triangle s_{i}} всех элементарных работ, когда мелкость | τ | \displaystyle разбиения τ {\displaystyle \tau } стремится к нулю, называется работой силы F {\displaystyle F} вдоль кривой G {\displaystyle G} .
Таким образом, если обозначить эту работу буквой W {\displaystyle W} , то, в силу данного определения,
W = lim | τ | → 0 ∑ i = 1 i τ F ( ξ i ) △ s i {\displaystyle W=\lim _\rightarrow 0\sum _{i=1}^{i_{\tau }}F(\xi _{i})\triangle s_{i}} ,следовательно,
W = ∫ 0 s F ( s ) d s {\displaystyle W=\int \limits _{0}^{s}F(s)ds} (1).Если положение точки на траектории её движения описывается с помощью какого-либо другого параметра t {\displaystyle t} (например, времени) и если величина пройденного пути s = s ( t ) {\displaystyle s=s(t)} , a ≤ t ≤ b {\displaystyle a\leq t\leq b} является непрерывно дифференцируемой функцией, то из формулы (1) получим
W = ∫ a b F [ s ( t ) ] s ′ ( t ) d t . {\displaystyle W=\int \limits _{a}^{b}F[s(t)]s'(t)dt.}Размерность и единицы
Единицей измерения работы в Международной системе единиц (СИ) является джоуль, в СГС — эрг
1 Дж = 1 кг·м²/с² = 1 Н·м 1 эрг = 1 г·см²/с² = 1 дин·см 1 эрг = 10−7 Джru.wikipedia.org
Дайте определение силы
Colt polkovnik
Си́ла — векторная физическая величина, являющаяся мерой интенсивности воздействия на данное тело других тел, а также полей. Приложенная к массивному телу сила является причиной изменения его скорости или возникновения в нём деформаций и напряжений [1][2].
Сила как векторная величина характеризуется модулем, направлением и «точкой» приложения силы. Последним параметром понятие о силе, как векторе в физике, отличается от понятия о векторе в векторной алгебре, где равные по модулю и направлению векторы, независимо от точки их приложения, считаются одним и тем же вектором . В физике эти векторы называются свободными векторами. В механике чрезвычайно распространено представление о связанных векторах, начало которых закреплено в определённой точке пространства или же может находиться на линии, продолжающей направление вектора (скользящие векторы) [3].
Также используется понятие линия действия силы, обозначающее проходящую через точку приложения силы прямую, по которой направлена сила.
Второй закон Ньютона гласит, что в инерциальных системах отсчета ускорение материальной точки по направлению совпадает с приложенной силой, а по модулю прямо пропорционально модулю силы и обратно пропорционально массе материальной точки. Или, что эквивалентно, в инерциальных системах отсчета скорость изменения импульса материальной точки равна приложенной силе.
При приложении силы к телу конечных размеров в нём возникают механические напряжения, сопровождающиеся деформациями [4][5][6][7].
С точки зрения Стандартной модели физики элементарных частиц фундаментальные взаимодействия (гравитационное, слабое, электромагнитное, сильное) осуществляются посредством обмена так называемыми калибровочными бозонами. [4] Эксперименты по физике высоких энергий, проведённые в 70−80-х гг. XX в. подтвердили предположение о том, что слабое и электромагнитное взаимодействия являются проявлениями более фундаментального электрослабого взаимодействия [8].
Размерность силы — LMT−2, единицей измерения в Международной системе единиц (СИ) является ньютон (N, Н) , в системе СГС — дина.
Читайте также
 Определение момента силы относительно точки
Определение момента силы относительно точки- Апелляционное определение вступает в законную силу
 Определение момента силы
Определение момента силы Сила тяжести определение
Сила тяжести определение Температура определение в физике
Температура определение в физике Сила ампера формула и определение
Сила ампера формула и определение Что такое механическое движение в физике определение
Что такое механическое движение в физике определение Что такое скорость в физике определение
Что такое скорость в физике определение Сила тока определение
Сила тока определение Определение направления силы лоренца
Определение направления силы лоренца Сила трения определение
Сила трения определение Работа определение в физике
Работа определение в физике
 Определение момента силы относительно точки
Определение момента силы относительно точки Определение момента силы
Определение момента силы Сила тяжести определение
Сила тяжести определение Температура определение в физике
Температура определение в физике Сила ампера формула и определение
Сила ампера формула и определение Что такое механическое движение в физике определение
Что такое механическое движение в физике определение Что такое скорость в физике определение
Что такое скорость в физике определение Сила тока определение
Сила тока определение Определение направления силы лоренца
Определение направления силы лоренца Сила трения определение
Сила трения определение Работа определение в физике
Работа определение в физике