МАТЕРИАЛЬНАЯ ТОЧКА это:
МАТЕРИАЛЬНАЯ ТОЧКА МАТЕРИАЛЬНАЯ ТОЧКА, понятие, вводимое в механике для обозначения тела, размерами и формой которого можно пренебречь. Положение материальной точки в пространстве определяется как положение геометрической точки. Тело можно считать материальной точкой в случаях, когда оно перемещается поступательно на большие (по сравнению с его размерами) расстояния; например, Земля радиусом около 6,4 тыс. км является материальной точкой в своем годовом движении вокруг Солнца (радиус орбиты - так называемой эклиптики - около 150 млн. км). Аналогично, понятие материальной точки применимо, если вращательную часть движения тела можно в условиях рассматриваемой задачи не учитывать (например, пренебречь суточным вращением Земли при изучении годового движения).Современная энциклопедия. 2000.
dic.academic.ru
Материальная точка
Основываясь на возможности локализации физических предметов во времени и пространстве, в классической механике исследование законов перемещения начинается с самого простого случая. Этим случаем является движение материальной точки. Схематической идеей элементарной частицы аналитическая механика формирует предпосылки для изложения основных законов динамики.
Материальная точка – это объект, обладающий бесконечно малым размером и конечной массой. Данная идея полностью отвечает представлениям о дискретности материи. Ранее физики пытались определить ее в качестве совокупности элементарных частиц, находящихся в состоянии перемещения. В связи с этим материальная точка в своей динамике стала как раз тем необходимым для теоретических построений инструментом.
Динамика рассматриваемого объекта исходит из инерциального принципа. Согласно ему, материальная точка, не находящаяся под влиянием внешних сил, сохраняет свое состояние покоя (либо перемещения) с течением времени. Данное положение выполняется достаточно строго.
В соответствии с принципом инерции, материальная точка (свободная) перемещается равномерно и прямолинейно. Рассматривая частный случай, в рамках которого скорость равна нулю, можно сказать, что объект сохраняет состояние покоя. В связи с этим можно предположить, что влияние определенной силы на рассматриваемый предмет сводится просто к изменению его скорости. Самой простой гипотезой является предположение, что изменение скорости, которой обладает материальная точка, прямо пропорционально показателю силы, воздействующей на нее. При этом коэффициент пропорциональности уменьшается с увеличением инерции.
Естественной является характеристика материальной точки с помощью величины коэффициента инерции – массы. В этом случае главный закон динамики объекта может формулироваться так: сообщаемое ускорение в каждый момент времени равно отношению силы, которая действует на объект, к ее массе. Изложение кинематики, таким образом, предшествует изложению динамики. Масса, которая в динамике характеризует материальную точку, вводится a posteriori (из опыта), в то время как наличие траектории, положения, ускорения, скорости допускается a priori.
В связи с этим уравнения динамики объекта утверждают, что произведение массы рассматриваемого объекта на какую-либо из компонент ее ускорения равно соответствующей компоненте силы, действующей на объект. Предположив, что сила является известной функцией времени и координат, определение координат для материальной точки в соответствии со временем производят посредством трех обычных дифференциальных уравнений второго порядка по времени.
В соответствии с хорошо известной теоремой из курса математического анализа, решение указанной системы уравнений однозначно определяется заданием координат, а также их первых производных в какой-либо начальный временной промежуток. Другими словами, при известном положении материальной точки и ее скорости в определенный момент можно точно определить характер ее перемещения во все будущие периоды.
В результате становится ясно, что классическая динамика рассматриваемого объекта находится в абсолютном соответствии с принципом физического детерминизма. Согласно ему, предстоящее состояние (положение) материального мира может быть предсказано полностью при наличии параметров, определяющих его положение в определенный предыдущий момент.
В связи с тем, что размер материальной точки бесконечно мал, ее траектория будет представлять собой линию, занимающую в трехмерном пространстве только одномерный континуум. В каждом участке траектории имеет место определенное значение силы, задающее перемещение в следующий бесконечно малый отрезок времени.
fb.ru
/ ответы по физика, не все
Вопрос
-
Механика, кинематика, динамика (определение, область задач).
Ответ
Механика — наука об общих законах движения тел.
Окружающие нас тела движутся сравнительно медленно. Поэтому их движения подчиняются законам Ньютона. Таким образом, область применения классической механики очень обширна. И в этой области человечество всегда будет пользоваться для описания любого движения тела законами Ньютона.
Кинематика — это раздел механики, изучающий способы описания движений и связь между величинами, характеризующими эти движения.
Описать движение тела — это значит указать способ определения его положения в пространстве в любой момент времени.
Вопрос
-
Механическое движение, тело отсчета, система отсчета, способы указания положения материальной точки на координатной плоскости, понятие кинематическое уравнение материальной точки.
Ответ
Механическим движением называется перемещение тел или частей тел в пространстве относительно друг друга с течением времени.
Тело, относительно которого рассматривается движение, называется телом отсчета.
Совокупность тела отсчета, связанной с ним системы координат и часов называют системой отсчета.
Математически движение тела (или материальной точки) по отношению к выбранной системе отсчёта описывается уравнениями, которые устанавливают, как изменяются с течением времени t координаты, определяющие положение тела (точки) в этой системе отсчёта. Эти уравнения называются уравнениями движения. Например, в декартовых координатах х, y, z движение точки определяется уравнениями ![]() ,
,![]() ,
,![]() .
.
Способы указания положения материальной точки на координатной плоскости
Задание положения точки с помощью координат. Из курса математики вы знаете, что положение точки на плоскости можно задать с помощью двух чисел, которые называются координатами этой точки. Для этого, как известно, можно на плоскости провести две пересекающиеся взаимно перпендикулярные оси, например оси ОХ и OY. Точку пересечения осей называют началом координат, а сами оси — координатными осями.
Координаты точки М1 (рис. 1.2) равны Xj = 2, ух — 4; координаты точки М2 равны х2 = -2,5, у2 = -3,5.
Положение точки М в пространстве относительно тела отсчета можно задать с помощью трех координат. Чтобы это сделать, необходимо через выбранную точку тела отсчета провести три взаимно перпендикулярные оси ОХ, OY, OZ. В полученной системе координат положение точки будет определяться тремя координатами х, у, z.
Если число х положительно, то отрезок откладывается в положительном направлении оси ОХ (рис. 1.3) (х — О А). Если же число х отрицательно, то отрезок откладывается в отрицательном направлении оси ОХ. Из конца этого отрезка проводят прямую, параллельную оси OY, и на этой прямой откладывают отрезок от оси ОХ, соответствующий числу у (у = АВ) — в положительном направлении оси OY, если М число у положительно, и в отрицательном направлении оси OY, если число у отрицательно.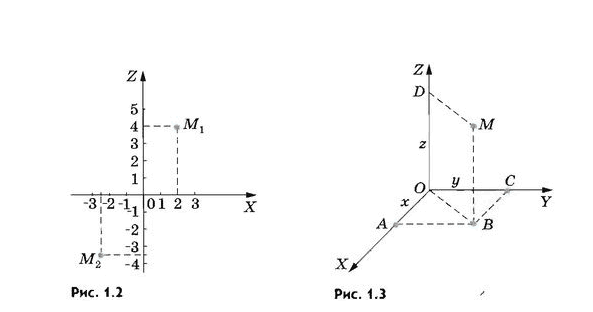
Далее из точки В другого от-У резка проводят прямую, параллельную оси OZ. На этой прямой от координатной плоскости XOY откладывают отрезок, соответствующий числу 2. Направление, рис. 1.4 в котором откладывают этот отрезок, определяют так же, как и в предыдущих случаях.
Конец третьего отрезка и есть та точка, положение которой задается координатами х, у, z.
Чтобы определить координаты данной точки, необходимо провести в обратной последовательности те операции, которые мы осуществляли, находя положение этой точки по ее координатам.
Задание положения точки с помощью радиус-вектора. Положение точки можно задать не только с помощью координат, но и с помощью радиус-вектора. Радиус-вектор — это направленный отрезок, проведенный из начала координат в данную точку. _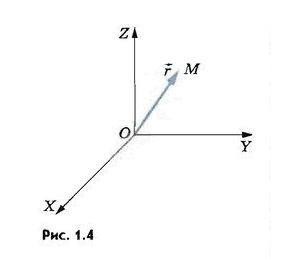
Радиус-вектор принято обозначать буквой г. Длина ра-диус-вектора, или, что одно и то же, его модуль (рис. 1.4), есть расстояние от начала координат до точки М.
Положение точки будет определено с помощью радиус-вектора только в том случае, если известны его модуль (длина) и направление в пространстве. Лишь при этом условии мы будем знать, в каком направлении от начала координат следует отложить отрезок длиной г, чтобы определить положение точки.
Итак, положение точки в пространстве определяется ее координатами или ее радиус-вектором.
Модуль и направление любого вектора находят по его проекциям на оси координат. Чтобы понять, как это делается, вначале необходимо ответить на вопрос: что понимают под проекцией вектора на ось?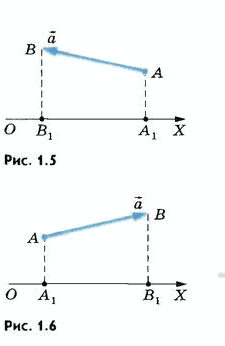
Изобразим какую-либо ось (рис. 1.5), например ось ОХ.
Опустим из начала А и конца В вектора а перпендикуляры на ось ОХ.
Точки Aj и Вj есть проекции, соответственно, начала и конца вектора а на эту ось.
Проекцией вектора а на какую-либо ось называется длина отрезка А1В1 между проекциями начала и конца вектора на эту ось, взятая со знаком «+» или «-».
Проекцию вектора мы будем обозначать той же буквой, что и вектор, но, во-первых, без стрелки над ней и, во-вторых, с индексом внизу, указывающим, на какую ось проецируется вектор. Так, ах и ау — проекции вектора а на оси координат ОХ и OY.
Согласно определению проекции вектора на ось можно записать: ах = ± I AjEJ.
Проекция вектора на ось представляет собой алгебраическую величину. Она выражается в тех же единицах, что и модуль вектора.
Условимся считать проекцию вектора на ось положительной, если от проекции начала вектора к проекции его конца надо идти в положительном направлении оси проекций. В противном случае (см. рис. 1.5) она считается отрицательной.
Из рисунков 1.5 и 1.6 нетрудно увидеть, что проекция . вектора на ось будет положительной, когда вектор составляет острый угол с направлением оси проекций, и отрицательной, когда вектор составляет с направлением оси проекций тупой угол.
Положение точки в пространстве можно задавать с помощью координат или радиус-вектора, соединяющего начало координат и точку.
СПОСОБЫ ОПИСАНИЯ ДВИЖЕНИЯ. СИСТЕМА ОТСЧЕТА
Если тело можно считать точкой, то для описания его движения нужно научиться рассчитывать положение точки в любой момент времени относительно выбранного тела отсчета.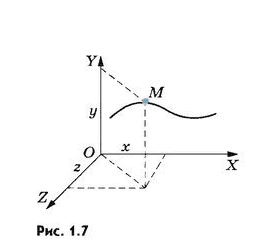
Существует несколько способов описания, или, что одно и то же, задания, движения точки. Рассмотрим два из них, которые наиболее часто применяются.
Координатный способ. Будем задавать положение точки с помощью координат (рис. 1.7). Если точка движется, то ее координаты изменяются с течением времени.
Так как координаты точки зависят от времени, то можно сказать, что они являются функциями времени. Математически это принято записывать в виде
 (1.1)
(1.1)
Уравнения (1.1) называют кинематическими уравнениями движения точки, записанными в координатной форме. Если они известны, то для каждого момента времени мы сможем рассчитать координаты точки, а следовательно, и ее положение относительно выбранного тела отсчета. Вид уравнений (1.1) для каждого конкретного движения будет вполне определенным.
Линия, по которой движется точка в пространстве, называется траекторией.
В зависимости от формы траектории все движения точки делятся на прямолинейные и криволинейные. Если траекторией является прямая линия, движение точки называется прямолинейным, а если кривая — криволинейным.
Векторный способ. Положение точки можно задать, как известно, и с помощью радиус-вектора. При движении материальной точки радиус-вектор, определяющий ее положение, с течением времени изменяется (поворачивается и меняет длину; рис. 1.8), т. е. является функцией времени: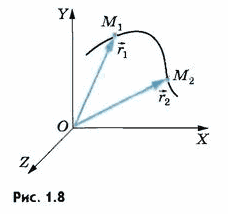
r=r(t). (1.2)
Последнее уравнение есть закон движения точки, записанный в векторной форме. Если он известен, то мы можем для любого момента времени рассчитать радиус-вектор точки, а значит, определить ее положение. Таким образом, задание трех скалярных уравнений (1.1) равносильно заданию одного векторного уравнения (1.2).
Кинематические уравнения движения, записанные в координатной или векторной форме, позволяют определить положение точки в любой момент времени.
Вопрос
-
Траектория, путь, перемещение.
Ответ
Траекто́рия материа́льной то́чки — линия в пространстве, представляющая собой множество точек, в которых находилась, находится или будет находиться материальная точка при своём перемещении в пространстве относительно выбранной системы отсчёта. Существенно, что понятие о траектории имеет физический смысл даже при отсутствии какого-либо по ней движения.Понятие траектории достаточно наглядно может быть проиллюстрировано трассой бобслея. (Если по условиям задачи можно пренебречь её шириной). И именно трассой, а не самим бобом.
Принято описывать траекторию материальной точки в наперёд заданной системе координат при помощи радиус-вектора, направление, длина и начальная точка которого зависят от времени. При этом кривая, описываемая концом радиус-вектора в пространстве может быть представлена в виде сопряжённых дуг различной кривизны, находящихся в общем случае в пересекающихся плоскостях. При этом кривизна каждой дуги определяется её радиусом кривизны, направленном к дуге из мгновенного центра поворота, находящегося в той же плоскости, что и сама дуга. При том прямая линия рассматривается как предельный случай кривой, радиус кривизны которой может считаться равным бесконечности. И потому траектория в общем случае может быть представлена как совокупность сопряжённых дуг.
Существенно, что форма траектории зависит от системы отсчёта, избранной для описания движения материальной точки. Так, прямолинейное равномерно ускоряющееся движение в одной инерциальной системе в общем случае будет параболическим в другой равномерно двигающейся инерциальной системе отсчёта.
Скорость материальной точки всегда направлена по касательной к дуге, используемой для описания траектории точки. При этом существует связь между величиной скорости , нормальным ускорением и радиусом кривизны траектории в данной точке:
![]()
Однако, не всякое движение с известной скоростью по кривой известного радиуса и найденное по приведённой выше формуле нормальное (центростремительное) ускорение связано с проявлением силы, направленной по нормали к траектории (центростремительной силы). Так, найденное по данным фотографии суточного движения светил ускорение любой из звёзд отнюдь не говорит о существовании вызывающей это ускорение силы, притягивающей её к Полярной звезде, как центру вращения.
Путь — длина участка траектории материальной точки в физике.
Перемеще́ние (в кинематике) — изменение местоположения физического тела в пространстве относительно выбранной системы отсчёта. Также перемещением называют вектор, характеризующий это изменение[1]. Обладает свойством аддитивности. Длина отрезка — это модуль перемещения, в Международной системе единиц (СИ) измеряется в метрах.
Можно определить перемещение, как изменение радиус-вектора точки: .
Модуль перемещения совпадает с пройденным путём в том и только в том случае, если при движении направление скорости не изменяется. При этом траекторией будет отрезок прямой. В любом другом случае, например, при криволинейном движении, из неравенства треугольника следует, что путь строго больше.
Мгновенная скорость точки определяется как предел отношения перемещения к малому промежутку времени, за которое оно совершено. Более строго:
Смотри викепедию………………………………………………..
Вопрос
-
Скорость, средняя скорость, мгновенная скорость, кинематическое уравнение для равномерного прямолинейного движения.
Ответ
Ско́рость (часто обозначается , от англ. velocity или фр. vitesse) — векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы отсчёта; по определению, равна производной радиус-вектора точки по времени[1]. Этим же словом называют и скалярную величину — либо модуль вектора скорости, либо алгебраическую скорость точки, т. е. проекцию этого вектора на касательную к траектории точки
Сре́дняя ско́рость — в кинематике, некоторая усреднённая характеристика скорости движущегося тела (или материальной точки). Различают два основных определения средней скорости, соответствующие рассмотрению скорости как скалярной либо векторной величины: средняя путевая скорость (скалярная величина) и средняя скорость по перемещению (векторная величина). При отсутствии дополнительных уточнений, под средней скоростью обычно понимают среднюю путевую скорость.
Можно также ввести среднюю скорость по перемещению, которая будет вектором, равным отношению перемещения ко времени, за которое оно совершено
Скоростью равномерного прямолинейного движения тела называется величина, равная отношению его перемещения к промежутку времени, в течение которого это перемещение произошло.
Мгновенная скорость - Мгновенной скоростью называется отношение изменения координаты точки к интервалу времени, за которое это изменение произошло, при интервале времени, стремящемся к нулю.
Геометрический смысл мгновенной скорости - коэффициент наклона касательной к графику закона движения.
Таким образом, мы «привязали» значение мгновенной скорости к конкретному моменту времени - задали значение скорости в данный момент времени, в данной точке пространства. Тем самым у нас появилась возможность рассматривать скорость тела как функцию времени, или функцию координаты.
Вопрос
-
Ускорение, среднее ускорение мгновенное ускорение, нормальное ускорение, тангенциальное ускорение, кинематическое уравнение для равнопеременного движения.
Ответ
Вопрос
-
Свободное падение тел. Ускорение свободного падения.
Ответ
вободным падением называется движение, которое совершило бы тело только под действием силы тяжести без учета сопротивления воздуха. При свободном падении тела с небольшой высоты h от поверхности Земли (h ≪Rз, где Rз - радиус Земли) оно движется с постоянным ускорением g, направленным вертикально вниз.
Ускорение g называется ускорением свободного падения. Оно одно и тоже для всех тел и зависит лишь от высоты над уровнем моря и от географической широты. Если в момент начала отсчета времени (t0 = 0) тело имело скорость v0, то по истечении произвольного промежутка времени ∆t = t - t0 скорость тела при свободном падении будет: v = v0 + g·t.
Путь h, пройденный телом в свободном падении, к моменту времени t:
Модуль скорости тела после прохождения в свободном падении пути h находится из формулы:
Т.к. vk2-v02=2·g·h, то
Продолжительность ∆t свободного падения без начальной скорости (v0 = 0) с высоты h:
Пример 1. Тело падает вертикально вниз с высоты 20 м без начальной скорости. Определить:
1) путь h, пройденный телом за последнюю секунду падения,
2) среднюю скорость падения vср,
3) среднюю скорость на второй половине пути vср2.
Вопрос
-
Основные положения молекулярно – кинематической теории.
Ответ
Вопрос
-
Понятие молекулы, атомная единица массы, относительная молекулярная масса атомов и молекул (Mr), количество вещества, постоянная авогадро, молярная масса.
Ответ
Вопрос
-
Идеальный газ. Основные уравнение молекулярно – кинетической теории идеального газа.
Ответ
-
Уравнение состояния идеального газа (уравнение Менделеева – Клапейрона).
Вопрос
-
Изотермический, изохорный и изобарный процессы.
Ответ
Вопрос
-
Электрический заряд и его свойства.
Ответ
Вопрос
-
Закон Кулона.
Вопрос
-
Электрическое поле. Напряженность электрического поля.
Ответ
Вопрос
-
Работа сил поля при перемещении заряда. Потенциал и разность потенциалов.
Ответ
Вопрос
-
Законы геометрической оптики, абсолютный показатель преломления света. Относительный показатель преломления света.
Ответ
Вопрос
-
Тонкие линзы, формула тонкой линзы.
Ответ
Линза – стекловидное тело ограниченное одной или двумя сферическими поверхностями.
Тонкая линза -
StudFiles.ru
Материальная точка ??
Валентина
Стандартное определение материа́льной то́чки в механике — модель объекта, размерами которого при решении задачи можно пренебречь. Однако более чётко можно говорить так: материальная точка — это модель механической системы, обладающая только поступательными, но не внутренними степенями свободы. Это автоматически означает неспособность материальной точки к деформациям и вращению. Механическая энергия может быть запасена в материальной точке лишь в виде кинетической энергии поступательного движения или потенциальной энергии взаимодействия с полем, но не в виде энергии вращения или деформации. Другими словами, материальная точка — простейшая механическая система, обладающая минимально возможным числом степеней свободы. Материальная точка может иметь массу, заряд, скорость, импульс, энергию.
Аккуратность этого определения видна из такого примера: в разреженном газе при высокой температуре размер каждой молекулы очень мал по сравнению с типичным расстоянием между молекулами. Казалось бы, им можно пренебречь и считать молекулу материальной точкой. Однако это не так: колебания и вращения молекулы — важный резервуар «внутренней энергии» молекулы, «ёмкость» которого определяется размерами молекулы.
Читайте также
 Определение окрестности точки
Определение окрестности точки Определение документооборота с точки зрения информации
Определение документооборота с точки зрения информации Определение пикетажного положения нулевых точек
Определение пикетажного положения нулевых точек Определение высот точек через горизонт прибора
Определение высот точек через горизонт прибора Определение документа с точки зрения информации
Определение документа с точки зрения информации Точка определение
Точка определение Определение момента силы относительно точки
Определение момента силы относительно точки Электрический ток определение
Электрический ток определение Административное право определение
Административное право определение Автомобиль определение
Автомобиль определение 3 Закон ньютона определение
3 Закон ньютона определение Вес определение
Вес определение
 Определение окрестности точки
Определение окрестности точки Определение документооборота с точки зрения информации
Определение документооборота с точки зрения информации Определение пикетажного положения нулевых точек
Определение пикетажного положения нулевых точек Определение высот точек через горизонт прибора
Определение высот точек через горизонт прибора Определение документа с точки зрения информации
Определение документа с точки зрения информации Точка определение
Точка определение Определение момента силы относительно точки
Определение момента силы относительно точки Электрический ток определение
Электрический ток определение Административное право определение
Административное право определение Автомобиль определение
Автомобиль определение 3 Закон ньютона определение
3 Закон ньютона определение Вес определение
Вес определение